MLI for Regular (Non-Time-Series) Experiments¶
This section describes MLI functionality and features for regular experiments. Refer to MLI for Time-Series Experiments for MLI information with time-series experiments.
Interpreting a Model¶
There are two methods you can use for interpreting models:
Using the Interpret this Model button on a completed experiment page to interpret a Driverless AI model on original and transformed features.
Using the MLI link in the upper right corner of the UI to interpret either a Driverless AI model or an external model.
Notes:
Experiments run in 1.7.0 and earlier are deprecated in this release. MLI will not be available for experiments from versions <= 1.7.0.
MLI does not require an Internet connection to run on current models.
Intrepret this Model Button - Non-Time-Series¶
Clicking the Interpret this Model button on a completed experiment page launches the Model Interpretation for that experiment. Python and Java logs can be viewed for non-time-series experiments while the interpretation is running.
For non-time-series experiments, this page provides several visual explanations and reason codes for the trained Driverless AI model and its results. More information about this page is available in the Understanding the Model Interpration Page section later in this chapter.
Model Interpretation on Driverless AI Models¶
This method allows you to run model interpretation on a Driverless AI model. This method is similar to clicking “Interpret This Model” on an experiment summary page.
Click the MLI link in the upper-right corner of the UI to view a list of interpreted models.
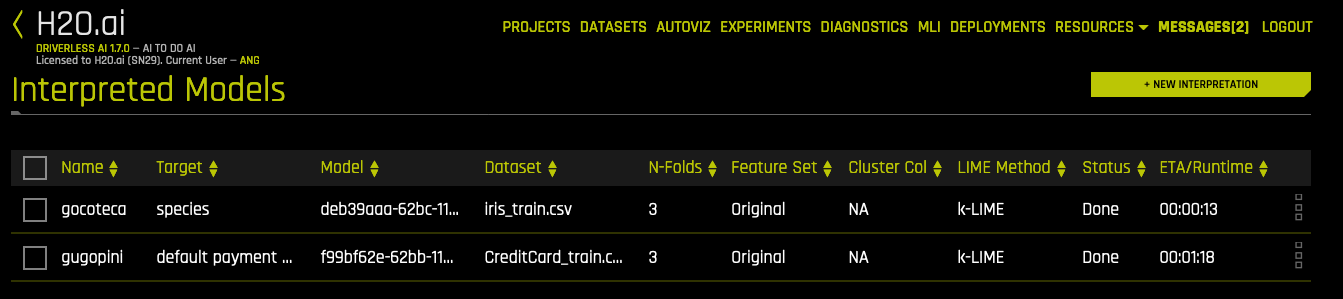
Click the New Interpretation button.
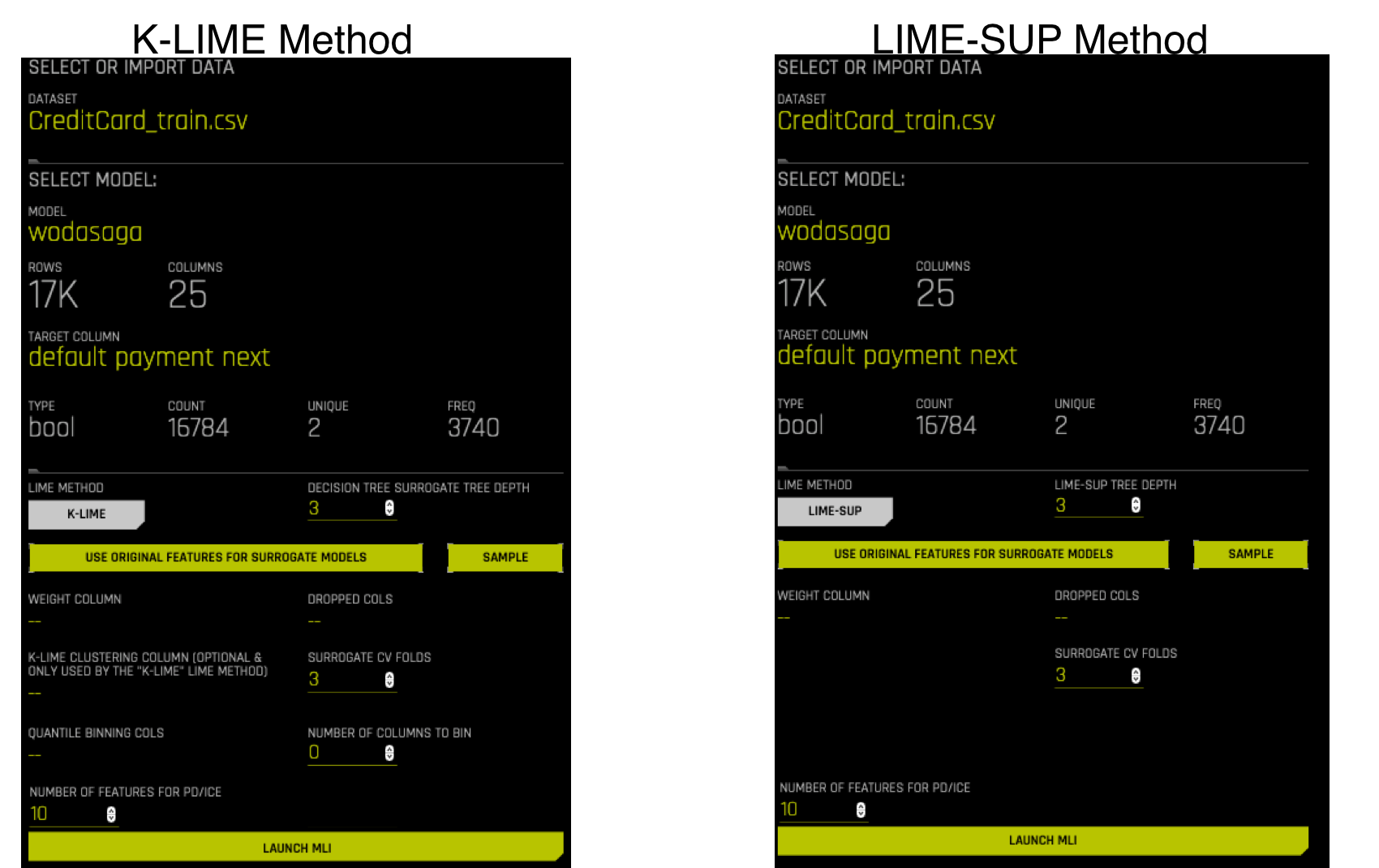
Select the dataset that was used to train the model that you will use for interpretation.
Specify the Driverless AI model that you want to use for the interpretation. Once selected, the Target Column used for the model will be selected.
Select a LIME method of either K-LIME (default) or LIME-SUP.
K-LIME creates one global surrogate GLM on the entire training data and also creates numerous local surrogate GLMs on samples formed from k-means clusters in the training data. The features used for k-means are selected from the Random Forest surrogate model’s variable importance. The number of features used for k-means is the minimum of the top 25% of variables from the Random Forest surrogate model’s variable importance and the max number of variables that can be used for k-means, which is set by the user in the config.toml setting for
mli_max_number_cluster_vars. (Note, if the number of features in the dataset are less than or equal to 6, then all features are used for k-means clustering.) The previous setting can be turned off to use all features for k-means by settinguse_all_columns_klime_kmeansin the config.toml file totrue. All penalized GLM surrogates are trained to model the predictions of the Driverless AI model. The number of clusters for local explanations is chosen by a grid search in which the \(R2\) between the Driverless AI model predictions and all of the local K-LIME model predictions is maximized. The global and local linear model’s intercepts, coefficients, \(R2\) values, accuracy, and predictions can all be used to debug and develop explanations for the Driverless AI model’s behavior.LIME-SUP explains local regions of the trained Driverless AI model in terms of the original variables. Local regions are defined by each leaf node path of the decision tree surrogate model instead of simulated, perturbed observation samples - as in the original LIME. For each local region, a local GLM model is trained on the original inputs and the predictions of the Driverless AI model. Then the parameters of this local GLM can be used to generate approximate, local explanations of the Driverless AI model.
For K-LIME interpretations, specify the depth that you want for your decision tree surrogate model. The tree depth value can be a value from 2-5 and defaults to 3. For LIME-SUP interpretations, specify the LIME-SUP tree depth. This can be a value from 2-5 and defaults to 3.
Specify whether to use original features or transformed features in the surrogate model for the new interpretation. Note: If Use Original Features for Surrogate Models is disabled, then the K-LIME clustering column option will not be available, and quantile binning will not be available.
Specify whether to perform the interpretation on a sample of the training data. By default, MLI will sample the training dataset if it is greater than 100k rows. (Note that this value can be modified in the config.toml setting for
mli_sample_size.) Turn this toggle off to run MLI on the entire dataset.Optionally specify weight and dropped columns.
For K-LIME interpretations, optionally specify a clustering column. Note that this column should be categorical. Also note that this is only available when K-LIME is used as the LIME method and when Use Original Features for Surrogate Models is enabled. If the LIME method is changed to LIME-SUP, then this option is no longer available.
Optionally specify the number of surrogate cross-validation folds to use (from 0 to 10). When running experiments, Driverless AI automatically splits the training data and uses the validation data to determine the performance of the model parameter tuning and feature engineering steps. For a new interpretation, Driverless AI uses 3 cross-validation folds by default for the interpretation.
For K-LIME interpretations, optionally specify one or more columns to generate decile bins (uniform distribution) to help with MLI accuracy. Columns selected are added to top n columns for quantile binning selection. If a column is not numeric or not in the dataset (transformed features), then the column will be skipped. Note: This option is only available when Use Original Features for Surrogate Models is enabled.
For K-LIME interpretations, optionally specify the number of top variable importance numeric columns to run decile binning to help with MLI accuracy. (Note that variable importances are generated from a Random Forest model.) This defaults to 0, and the maximum value is 10. Note: This option is only available when Use Original Features for Surrogate Models is enabled.
Optionally specify the number of top features for which partial dependence and ICE will be computed. This value defaults to 10. Setting a value greater than 10 can significantly increase the computation time. Setting this to -1 specifies to use all features.
Click the Launch MLI button.
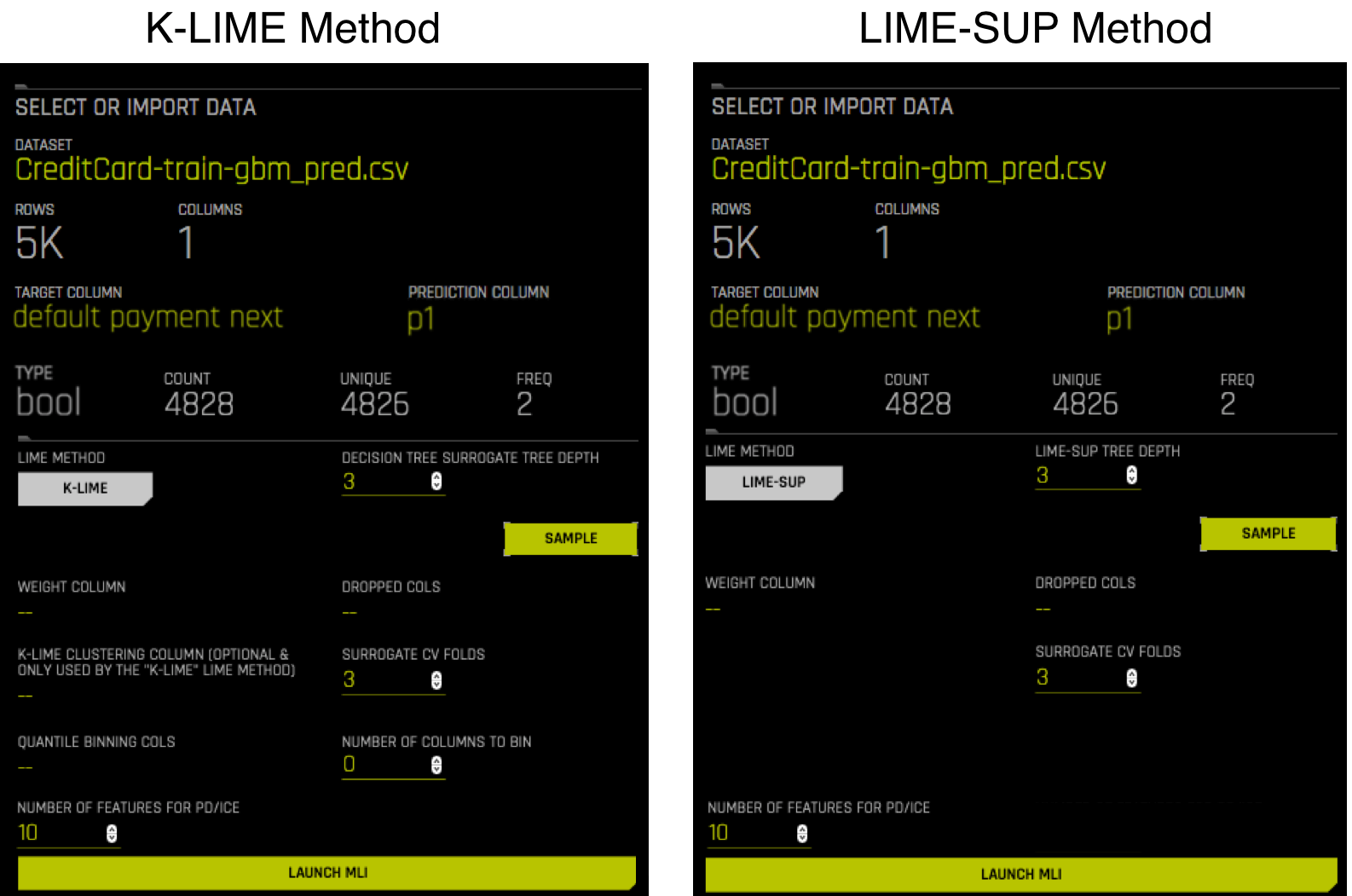
Model Interpretation on External Models¶
Model Interpretation does not need to be run on a Driverless AI experiment. You can train an external model and run Model Interpretability on the predictions.
Click the MLI link in the upper-right corner of the UI to view a list of interpreted models.
Click the New Interpretation button.
Select the dataset that you want to use for the model interpretation. This must include a prediction column that was generated by the external model. If the dataset does not have predictions, then you can join the external predictions. An example showing how to do this in Python is available in the Run Model Interpretation on External Model Predictions section of the Credit Card Demo.
Note: When running interpretations on an external model, leave the Select Model option empty. That option is for selecting a Driverless AI model.
Specify a Target Column (actuals) and the Prediction Column (scores from the model).
Select a LIME method of either K-LIME (default) or LIME-SUP.
K-LIME creates one global surrogate GLM on the entire training data and also creates numerous local surrogate GLMs on samples formed from k-means clusters in the training data. The features used for k-means are selected from the Random Forest surrogate model’s variable importance. The number of features used for k-means is the minimum of the top 25% of variables from the Random Forest surrogate model’s variable importance and the max number of variables that can be used for k-means, which is set by the user in the config.toml setting for
mli_max_number_cluster_vars. (Note, if the number of features in the dataset are less than or equal to 6, then all features are used for k-means clustering.) The previous setting can be turned off to use all features for k-means by settinguse_all_columns_klime_kmeansin the config.toml file totrue. All penalized GLM surrogates are trained to model the predictions of the Driverless AI model. The number of clusters for local explanations is chosen by a grid search in which the \(R2\) between the Driverless AI model predictions and all of the local K-LIME model predictions is maximized. The global and local linear model’s intercepts, coefficients, \(R2\) values, accuracy, and predictions can all be used to debug and develop explanations for the Driverless AI model’s behavior.LIME-SUP explains local regions of the trained Driverless AI model in terms of the original variables. Local regions are defined by each leaf node path of the decision tree surrogate model instead of simulated, perturbed observation samples - as in the original LIME. For each local region, a local GLM model is trained on the original inputs and the predictions of the Driverless AI model. Then the parameters of this local GLM can be used to generate approximate, local explanations of the Driverless AI model.
For K-LIME interpretations, specify the depth that you want for your decision tree surrogate model. The tree depth value can be a value from 2-5 and defaults to 3. For LIME-SUP interpretations, specify the LIME-SUP tree depth. This can be a value from 2-5 and defaults to 3.
Specify whether to perform the interpretation on a sample of the training data. By default, MLI will sample the training dataset if it is greater than 100k rows. (Note that this value can be modified in the config.toml setting for
mli_sample_size.) Turn this toggle off to run MLI on the entire dataset.Optionally specify weight and dropped columns.
For K-LIME interpretations, optionally specify a clustering column. Note that this column should be categorical. Also note that this is only available when K-LIME is used as the LIME method. If the LIME method is changed to LIME-SUP, then this option is no longer available.
Optionally specify the number of surrogate cross-validation folds to use (from 0 to 10). When running experiments, Driverless AI automatically splits the training data and uses the validation data to determine the performance of the model parameter tuning and feature engineering steps. For a new interpretation, Driverless AI uses 3 cross-validation folds by default for the interpretation.
For K-LIME interpretations, optionally specify one or more columns to generate decile bins (uniform distribution) to help with MLI accuracy. Columns selected are added to top n columns for quantile binning selection. If a column is not numeric or not in the dataset (transformed features), then the column will be skipped.
For K-LIME interpretations, optionally specify the number of top variable importance numeric columns to run decile binning to help with MLI accuracy. (Note that variable importances are generated from a Random Forest model.) This value is combined with any specific columns selected for quantile binning. This defaults to 0, and the maximum value is 10.
Optionally specify the number of top features for which partial dependence and ICE will be computed. This value defaults to 10. Setting a value greater than 10 can significantly increase the computation time. Setting this to -1 specifies to use all features.
Click the Launch MLI button.
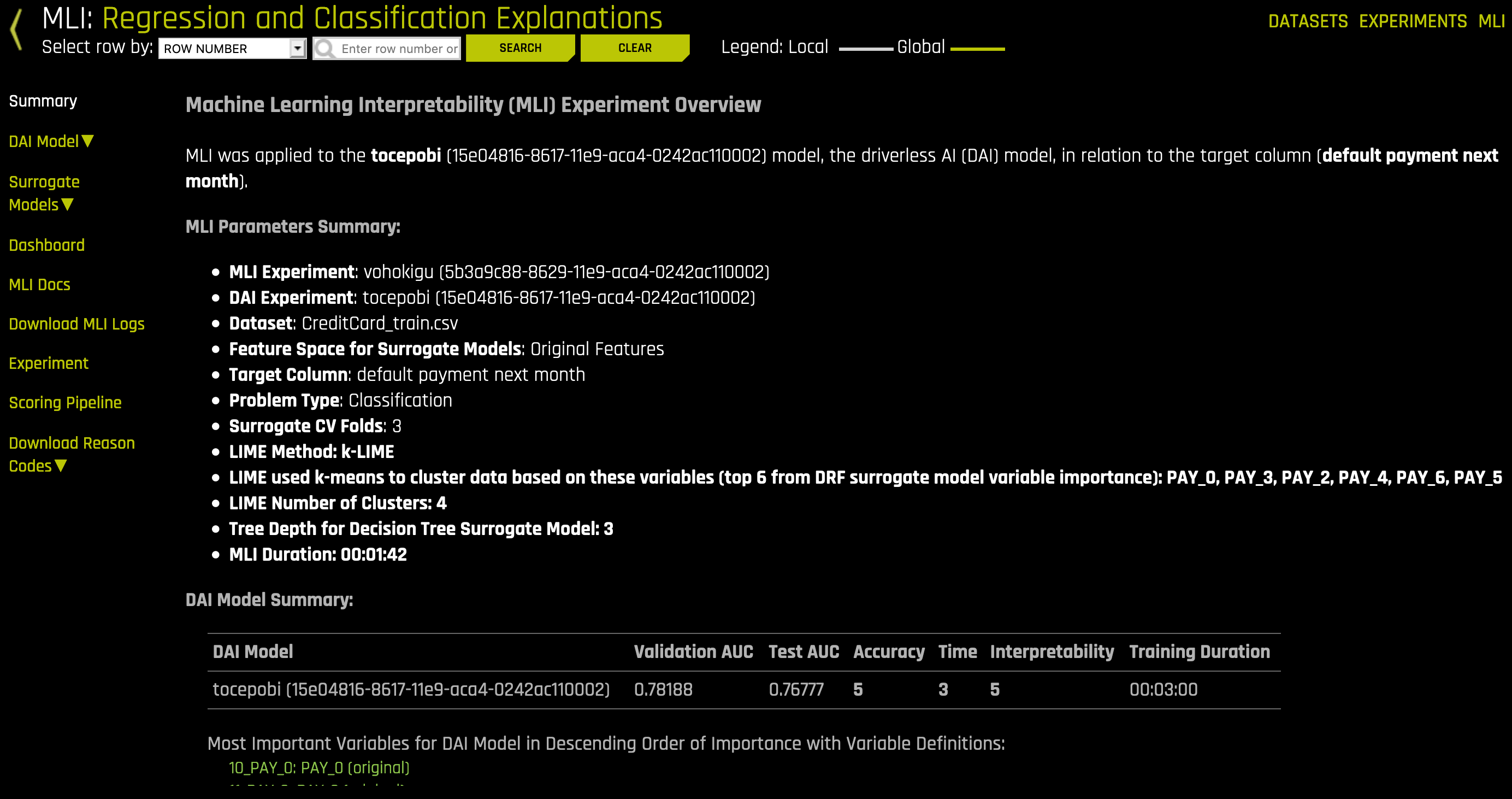
Understanding the Model Interpretation Page¶
This section describes the features on the Model Interpretation page for non-time-series experiments.
The Model Interpretation page opens with a Summary of the interpretation and also provides a row search feature on the top of the page:
Row Selection: Provides the ability to search for a particular row by Row Number or by Identifier Column. See the Row Selection section for more information.
This page also provides left-hand navigation for viewing additional plots. This navigation includes:
Summary: Provides a summary of the MLI experiment. See the Summary Page section for more information.
DAI Model: See DAI Model Dropdown for more information.
For binary classification and regression experiments, the DAI Model menu provides the following plots for Driverless AI models:
Feature Importance for transformed features
Shapley plot for transformed features
Partial Dependence/ICE
Disparate Impact Analysis
Sensitivity Analysis
NLP Tokens (for text experiments only)
NLP LOCO (for text experiments)
Permutation Feature Importance (if the
autodoc_include_permutation_feature_importanceconfiguration option is enabled)
For multiclass classification experiments, the DAI Model menu provides the following plots for Driverless AI models:
Feature Importance for transformed features
Shapley plots for transformed features
Notes:
Shapley plots are not supported for RuleFit and TensorFlow models. Shapley plots are also not supported for BYOR models that DO NOT implement the
has_pred_contribsmethod and DO implementpred_contribs=Trueinpredict.The Permutation-based feature importance plot is only available when the
autodoc_include_permutation_feature_importanceconfiguration option is enabled when starting Driverless AI or when starting the experiment.
Surrogate Models: See Surrogate Models Dropdown for more information.
For binary classification and regression experiments, the Surrogate Model menu provides K-LIME and Decision Tree plots. This also includes a Random Forest submenu, which includes Global and Local Feature Importance plots for original features and a Partial Dependence plot.
For multiclass classification experiments, the Surrogate Model menu provides a Random Forest submenu that includes a Global Feature Importance plot for the Random Forest surrogate model.
Dashboard: See the Dashboard Page section for more information.
For binary classification and regression experiments, the Dashboard page provides a single page with a Global Interpretable Model Explanations plot, a Feature Importance plot, a Decision Tree plot, and a Partial Dependence plot.
The Dashboard page is not available for multinomial experiments.
MLI Docs: A link to the Interpreting a Model section in the online help.
Download MLI Logs: Downloads a zip file of the logs that were generated during this interpretation.
Experiment: Provides a link back to the experiment that generated this interpretation.
Scoring Pipeline:
For binomial and regression experiments, Scoring Pipeline option downloads the scoring pipeline for this interpretation.
The Scoring Pipeline option is not available for multinomial experiments.
Download k-LIME MOJO: Download the k-LIME MOJO Reason Code Pipeline. For more info, see Driverless AI k-LIME MOJO Reason Code Pipeline - Java Runtime.
Download Reason Codes:
For binomial experiments, download a CSV file of LIME and/or Shapley reason codes.
For multinomial experiments, download a CSV file of the Shapley reason codes.
Row Selection¶
The row selection feature allows a user to search for a particular observation by row number or by an identifier column. Identifier columns cannot be specified by the user - MLI makes this choice automatically by choosing columns whose values are unique (dataset row count equals the number of unique values in a column). To find a row by identifier column, choose Identifier Column from the drop-down menu (if it meets the logic of being an identifier column), and then specify a value. In addition to identifier columns, the drop-down menu also allows you to find a row using Row Number.
Summary Page¶
The Summary page is the first page that opens when you view an interpretation. This page provides an overview of the interpretation, including the dataset and Driverless AI experiment (if available) that were used for the interpretation along with the feature space (original or transformed), target column, problem type, and k-Lime information. If the interpretation was created from a Driverless AI model, then a table with the Driverless AI model summary is also included along with the top variables for the model.
DAI Model Dropdown¶
This menu provides a Feature Importance plot and a Shapley plot (not supported for RuleFit and TensorFlow models) for transformed features as well as Partial Dependence/ICE, Disparate Impact Analysis (DIA), Sensitivity Analysis, NLP Tokens and NLP LOCO (for text experiments), and Permutation Feature Importance (if the autodoc_include_permutation_feature_importance configuration option is enabled) plots for Driverless AI models.
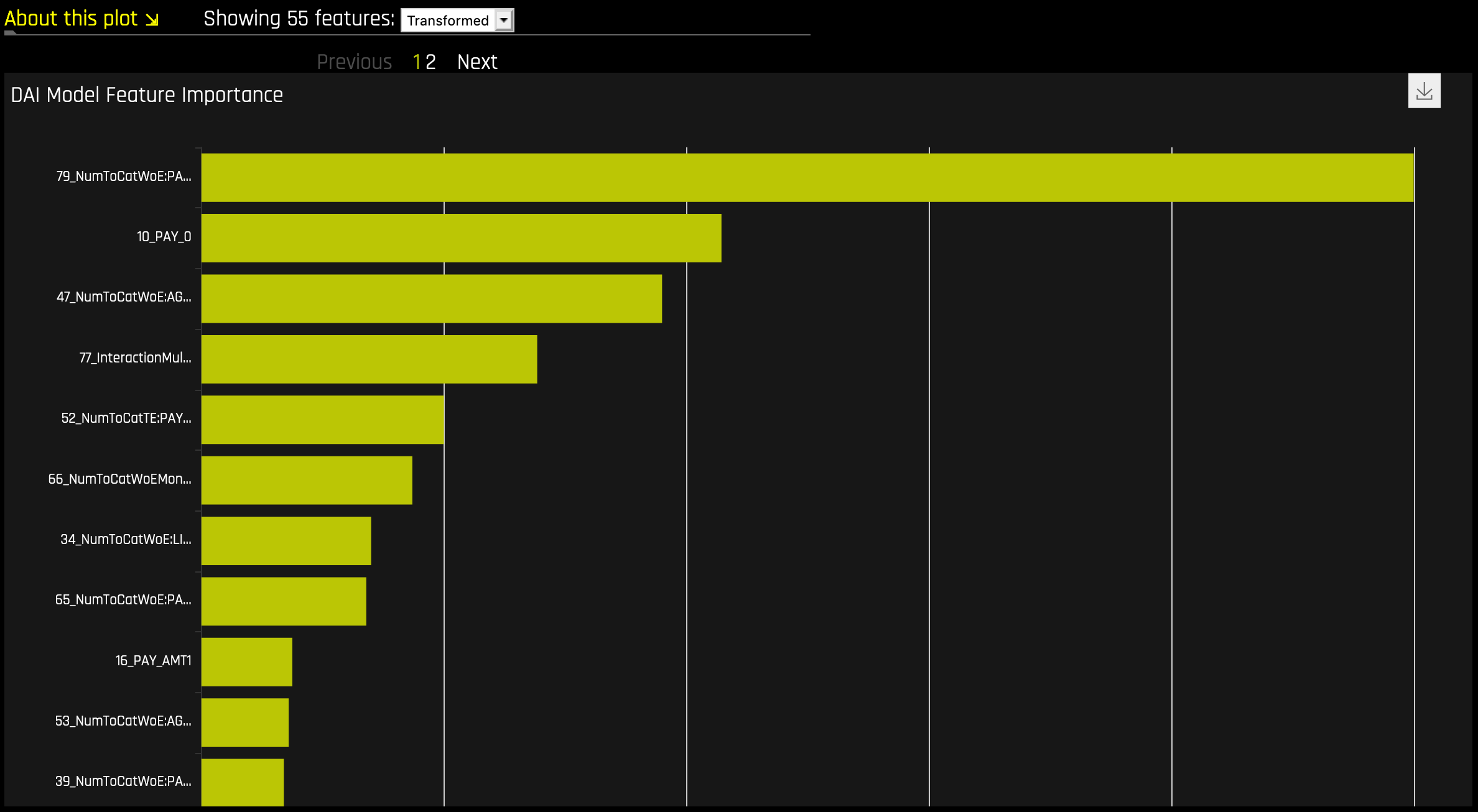
Note: On the Feature Importance and Shapley plots, the transformed feature names are encoded as follows:
<transformation/gene_details_id>_<transformation_name>:<orig>:<…>:<orig>.<extra>
So in
32_NumToCatTE:BILL_AMT1:EDUCATION:MARRIAGE:SEX.0, for example:
32_is the transformation index for specific transformation parameters.
NumToCatTEis the tranformation type.
BILL_AMT1:EDUCATION:MARRIAGE:SEXrepresent original features used.
0represents the likelihood encoding for target[0] after grouping by features (shown here asBILL_AMT1,EDUCATION,MARRIAGEandSEX) and making out-of-fold estimates. For multiclass experiments, this value is > 0. For binary experiments, this value is always 0.
Feature Importance¶
This plot is available for all models for binary classification, multiclass classification, and regression experiments.
This plot shows the Driverless AI feature importance. Driverless AI feature importance is a measure of the contribution of an input variable to the overall predictions of the Driverless AI model. Global feature importance is calculated by aggregating the improvement in splitting criterion caused by a single variable across all of the decision trees in the Driverless AI model.
Shapley Plot¶
This plot is not available for RuleFit or TensorFlow models. For all other models, this plot is available for binary classification, multiclass classification, and regression experiments.
Shapley explanations are a technique with credible theoretical support that presents consistent global and local variable contributions. Local numeric Shapley values are calculated by tracing single rows of data through a trained tree ensemble and aggregating the contribution of each input variable as the row of data moves through the trained ensemble. For regression tasks, Shapley values sum to the prediction of the Driverless AI model. For classification problems, Shapley values sum to the prediction of the Driverless AI model before applying the link function. Global Shapley values are the average of the absolute Shapley values over every row of a dataset.
More information is available at https://arxiv.org/abs/1706.06060.

The Showing \(n\) Features dropdown for Feature Importance and Shapley plots allows you to select between original and transformed features. If there are a significant amount of features, they will be organized in numbered pages that can be viewed individually. Note: The provided original values are approximations derived from the accompanying transformed values. For example, if the transformed feature \(feature1\_feature2\) has a value of 0.5, then the value of the original features (\(feature1\) and \(feature2\)) will be 0.25.
Partial Dependence (PDP) and Individual Conditional Expectation (ICE)¶
A Partial Dependence and ICE plot is available for both Driverless AI and surrogate models.
The Partial Dependence Technique¶
Partial dependence is a measure of the average model prediction with respect to an input variable. Partial dependence plots display how machine-learned response functions change based on the values of an input variable of interest, while taking nonlinearity into consideration and averaging out the effects of all other input variables. Partial dependence plots are well-known and described in the Elements of Statistical Learning (Hastie et al, 2001). Partial dependence plots enable increased transparency in Driverless AI models and the ability to validate and debug Driverless AI models by comparing a variable’s average predictions across its domain to known standards, domain knowledge, and reasonable expectations.
The ICE Technique¶
This plot is available for binary classification and regression models.
Individual conditional expectation (ICE) plots, a newer and less well-known adaptation of partial dependence plots, can be used to create more localized explanations for a single individual using the same basic ideas as partial dependence plots. ICE Plots were described by Goldstein et al (2015). ICE values are simply disaggregated partial dependence, but ICE is also a type of nonlinear sensitivity analysis in which the model predictions for a single row are measured while a variable of interest is varied over its domain. ICE plots enable a user to determine whether the model’s treatment of an individual row of data is outside one standard deviation from the average model behavior, whether the treatment of a specific row is valid in comparison to average model behavior, known standards, domain knowledge, and reasonable expectations, and how a model will behave in hypothetical situations where one variable in a selected row is varied across its domain.
Given the row of input data with its corresponding Driverless AI and K-LIME predictions:
debt_to_income_ ratio |
credit_ score |
savings_acct_ balance |
observed_ default |
H2OAI_predicted_ default |
K-LIME_predicted_ default |
|---|---|---|---|---|---|
30 |
600 |
1000 |
1 |
0.85 |
0.9 |
Taking the Driverless AI model as F(X), assuming credit scores vary from 500 to 800 in the training data, and that increments of 30 are used to plot the ICE curve, ICE is calculated as follows:
\(\text{ICE}_{credit\_score, 500} = F(30, 500, 1000)\)
\(\text{ICE}_{credit\_score, 530} = F(30, 530, 1000)\)
\(\text{ICE}_{credit\_score, 560} = F(30, 560, 1000)\)
\(...\)
\(\text{ICE}_{credit\_score, 800} = F(30, 800, 1000)\)
The one-dimensional partial dependence plots displayed here do not take interactions into account. Large differences in partial dependence and ICE are an indication that strong variable interactions may be present. In this case partial dependence plots may be misleading because average model behavior may not accurately reflect local behavior.
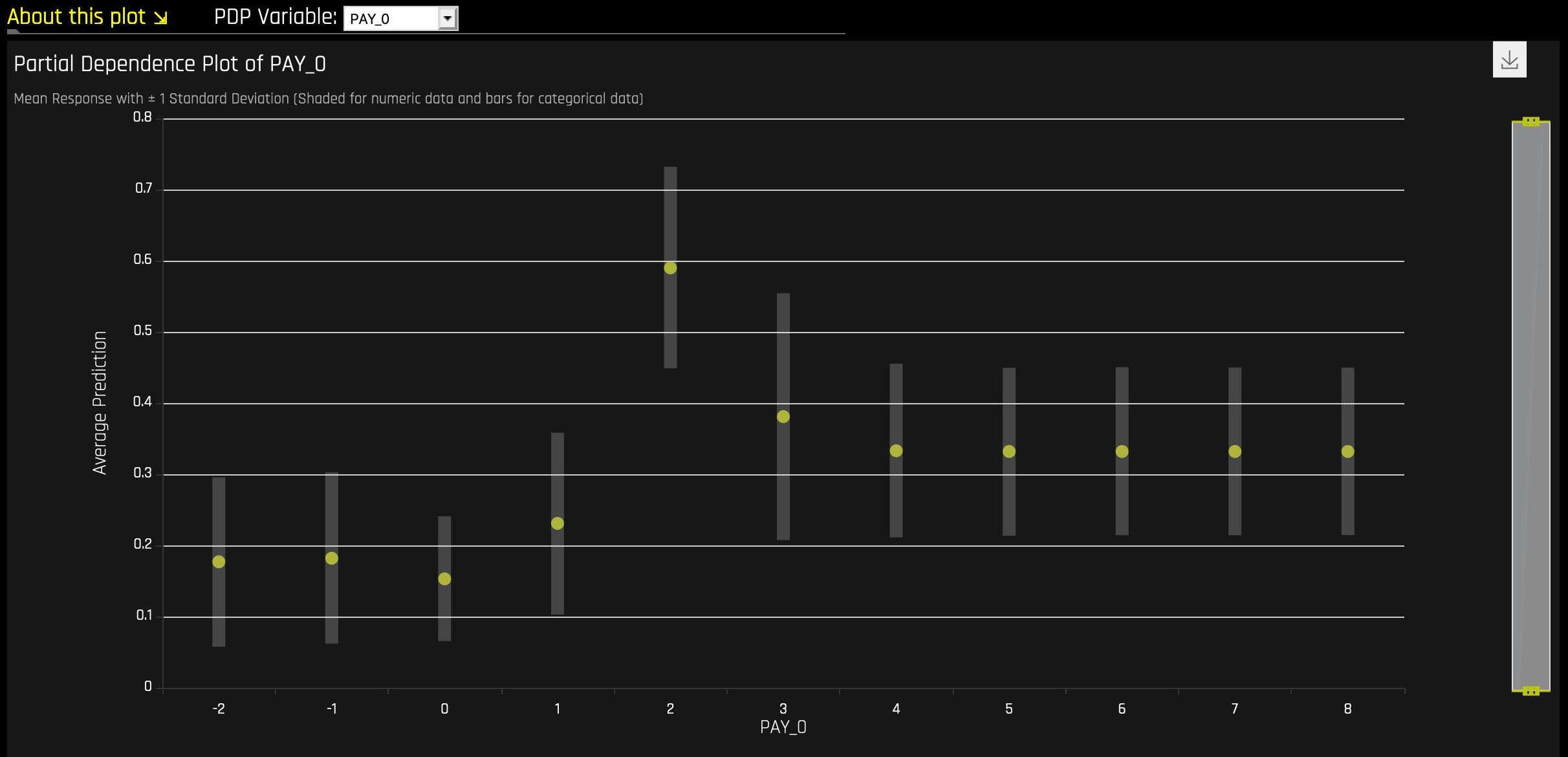
The Partial Dependence Plot¶
This plot is available for binary classification and regression models.
Overlaying ICE plots onto partial dependence plots allow the comparison of the Driverless AI model’s treatment of certain examples or individuals to the model’s average predictions over the domain of an input variable of interest.
This plot shows the partial dependence when a variable is selected and the ICE values when a specific row is selected. Users may select a point on the graph to see the specific value at that point. Partial dependence (yellow) portrays the average prediction behavior of the Driverless AI model across the domain of an input variable along with +/- 1 standard deviation bands. ICE (grey) displays the prediction behavior for an individual row of data when an input variable is toggled across its domain. Currently, partial dependence and ICE plots are only available for the top ten most important original input variables. Categorical variables with 20 or more unique values are never included in these plots.
Disparate Impact Analysis¶
This plot is available for binary classification and regression models.
DIA is a technique that is used to evaluate fairness. Bias can be introduced to models during the process of collecting, processing, and labeling data—as a result, it is important to determine whether a model is harming certain users by making a significant number of biased decisions.
DIA typically works by comparing aggregate measurements of unprivileged groups to a privileged group. For instance, the proportion of the unprivileged group that receives the potentially harmful outcome is divided by the proportion of the privileged group that receives the same outcome—the resulting proportion is then used to determine whether the model is biased. Refer to the Summary section to determine if a categorical level (for example, Fairness Female) is fair in comparison to the specified reference level and user-defined thresholds. Fairness All is a true or false value that is only true if every category is fair in comparison to the reference level.
Disparate impact testing is best suited for use with constrained models in Driverless AI, such as linear models, monotonic GBMs, or RuleFit. The average group metrics reported in most cases by DIA may miss cases of local discrimination, especially with complex, unconstrained models that can treat individuals very differently based on small changes in their data attributes.
DIA allows you to specify a disparate impact variable (the group variable that is analyzed), a reference level (the group level that other groups are compared to), and user-defined thresholds for disparity. Several tables are provided as part of the analysis:
Group metrics: The aggregated metrics calculated per group. For example, true positive rates per group.
Group disparity: This is calculated by dividing the
metric_for_groupby thereference_group_metric. Disparity is observed if this value falls outside of the user-defined thresholds.Group parity: This builds on Group disparity by converting the above calculation to a true or false value by applying the user-defined thresholds to the disparity values.
In accordance with the established four-fifths rule, user-defined thresholds are set to 0.8 and 1.25 by default. These thresholds will generally detect if the model is (on average) treating the non-reference group 20% more or less favorably than the reference group. Users are encouraged to set the user-defined thresholds to align with their organization’s guidance on fairness thresholds.
Metrics - Binary Classification¶
The following are formulas for error metrics and parity checks utilized by binary DIA. Note that in the tables below:
tp = true positive
fp = false positive
tn = true negative
fn = false negative
Error Metric / Parity Metric |
Formula |
Adverse Impact |
(tp + fp) / (tp + tn + fp + fn) |
Accuracy |
(tp + tn) / (tp + tn + fp + fn) |
True Positive Rate |
tp / (tp + fn) |
Precision |
tp / (tp + fp) |
Specificity |
tn / (tn + fp) |
Negative Predicted Value |
tn / (tn + fn) |
False Positive Rate |
fp / (tn + fp) |
False Discovery Rate |
fp / (tp + fp) |
False Negative Rate |
fn / (tp + fn) |
False Omissions Rate |
fn / (tn + fn) |
Parity Check |
Description |
|
|---|---|---|
Type I Parity |
Fairness in both FDR Parity and FPR Parity |
|
Type II Parity |
Fairness in both FOR Parity and FNR Parity |
|
Equalized Odds |
Fairness in both FPR Parity and TPR Parity |
|
Supervised Fairness |
Fairness in both Type I and Type II Parity |
|
Overall Fairness |
Fairness across all parities for all metrics where:
|
|
Metrics - Regression¶
The following are metrics utilized by regression DIA:
Mean Prediction: The mean of all predictions
Std.Dev Prediction: The standard deviation of all predictions
Maximum Prediction: The prediction with the highest value
Minimum Prediction: The prediction with the lowest value
R2: The measure that represents the proportion of the variance for a dependent variable that is explained by an independent variable or variables
RMSE: The measure of the differences between values predicted by a model and the values actually observed
Notes:
Although the process of DIA is the same for both classification and regression experiments, the returned information is dependent on the type of experiment being interpreted. An analysis of a regression experiment returns an actual vs. predicted plot, while an analysis of a binary classification experiment returns confusion matrices.
Users are encouraged to consider the explanation dashboard to understand and augment results from disparate impact analysis. In addition to its established use as a fairness tool, users may want to consider disparate impact for broader model debugging purposes. For example, users can analyze the supplied confusion matrices and group metrics for important, non-demographic features in the Driverless AI model.

Classification Experiment¶

Regression Experiment¶
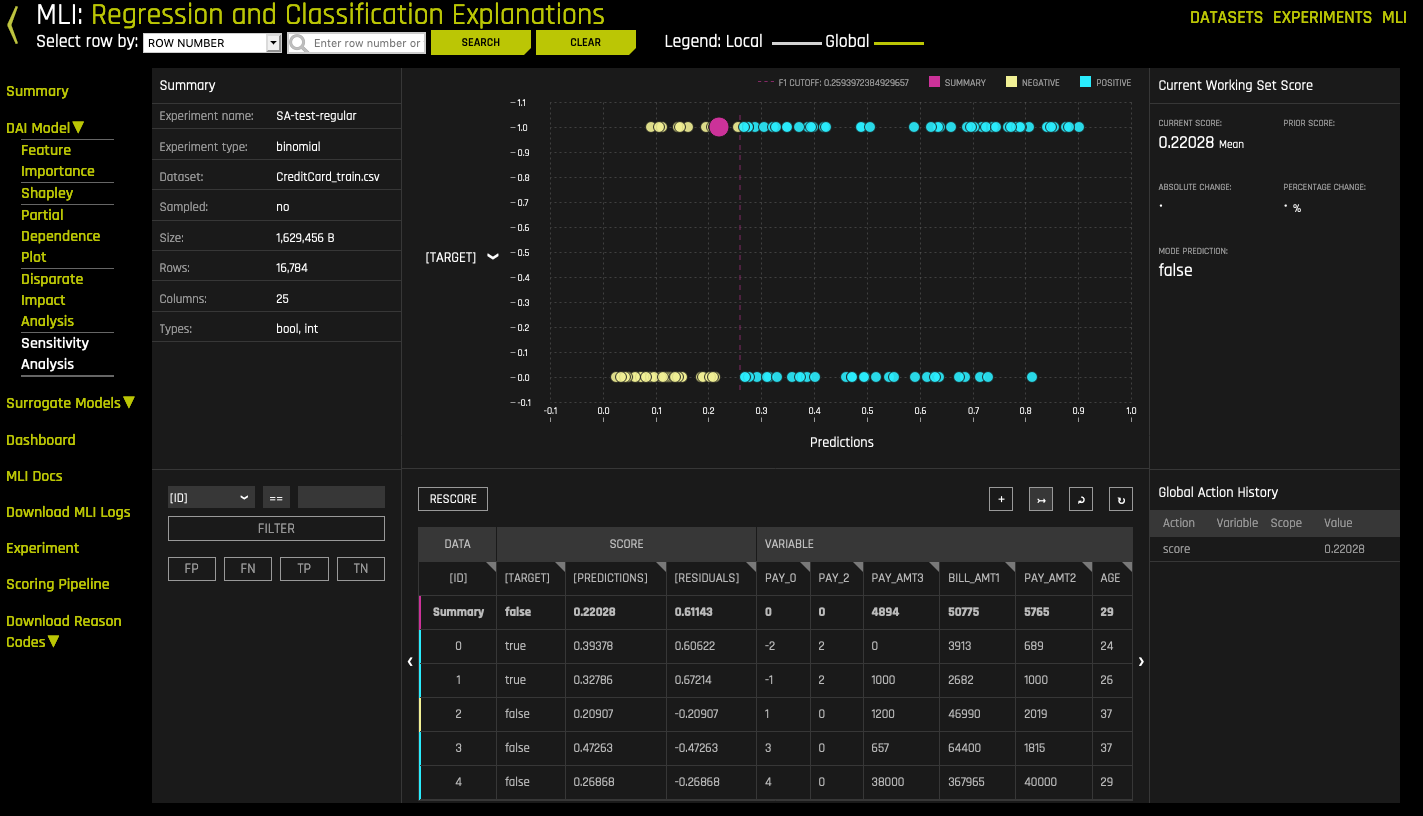
Sensitivity Analysis¶
Note: Sensitivity Analysis (SA) is not available for multiclass experiments.
Sensitivity Analysis (or “What if?”) is a simple and powerful model debugging, explanation, fairness, and security tool. The idea behind SA is both direct and simple: Score your trained model on a single row, on multiple rows, or on an entire dataset of potentially interesting simulated values and compare the model’s new outcome to the predicted outcome on the original data.
Beyond traditional assessment practices, sensitivity analysis of machine learning model predictions is perhaps the most important validation technique for machine learning models. Sensitivity analysis investigates whether model behavior and outputs remain stable when data is intentionally perturbed or other changes are simulated in the data. Machine learning models can make drastically differing predictions for only minor changes in input variable values. For example, when looking at predictions that determine financial decisions, SA can be used to help you understand the impact of changing the most important input variables and the impact of changing socially sensitive variables (such as Sex, Age, Race, etc.) in the model. If the model changes in reasonable and expected ways when important variable values are changed, this can enhance trust in the model. Similarly, if the model changes to sensitive variables have minimal impact on the model, then this is an indication of fairness in the model predictions.
This page utilizes the What If Tool for displaying the SA information.
The top portion of this page includes:
A summary of the experiment
Predictions for a specified column. Change the column on the Y axis to view predictions for that column.
The current working score set. This updates each time you rescore.
The bottom portion of this page includes:
A filter tool for filtering the analysis. Choose a different column, predictions, or residuals. Set the filter type (
<,>, etc.). Choose to filter by False Positive, False Negative, True Positive, or True Negative.Scoring chart. Click the Rescore button after applying a filter to update the scoring chart. This chart also allows you to add or remove variables, toggle the main chart aggregation, reset the data, and delete the global history while resetting the data.
The current history of actions taken on this page. You can delete individual actions by selecting the action and then clicking the Delete button that appears.
Use Case 1: Using SA on a Single Row or on a Small Group of Rows
This section describes scenarios for using SA for explanation, debugging, security, or fairness when scoring a trained model on a single row or on a small group of rows.
Explanation: Change values for a variable, and then rescore the model. View the difference between the original prediction and the new model prediction. If the change is big, then the changed variable is locally important.
Debugging: Change values for a variable, and then rescore the model. View the difference between the original prediction and the new model prediction and determine whether the change to variable made the model more or less accurate.
Security: Change values for a variable, and then rescore the model. View the difference between the original prediction and the new model prediction. If the change is big, then the user can, for example, inform their IT department that this variable can be used in an adversarial attack or inform the model makers that this variable should be more regularized.
Fairness: Change values for a demographic variable, and then rescore the model. View the difference between the original prediction and the new model prediction. If change is big, then the user can consider using a different model, regularizing the model more, or applying post-hoc bias remediation techniques.
Random: Set variables to random values, and then rescore the model. This can help you look for things the you might not have thought of.
Use Case 2: Using SA on an Entire Dataset and Trained Model
This section describes scenarios for using SA for explanation, debugging, security, or fairness when scoring a trained model for an entire dataset and trained predictive model.
Financial Stress Testing: Assume the user wants to see how their loan default rates will change (according to their trained probability of default model) when they change an entire dataset to simulate that all their customers are under more financial stress (such as lower FICO scores, lower savings balances, higher unemployment, etc). Change the values of the variables in their entire dataset, and look at the Percentage Change in the average model score (default probability) on the original and new data. They can then use this discovered information along with external information and processes to understand whether their institution has enough cash on hand to be prepared for the simulated crisis.
Random: Set variables to random values, and then rescore the model. This allows the user to look for things the user might not have thought of.
Additional Resources¶
Sensitivity Analysis on a Driverless AI Model: This ipynb uses the UCI credit card default data to perform sensitivity analysis and test model performance.
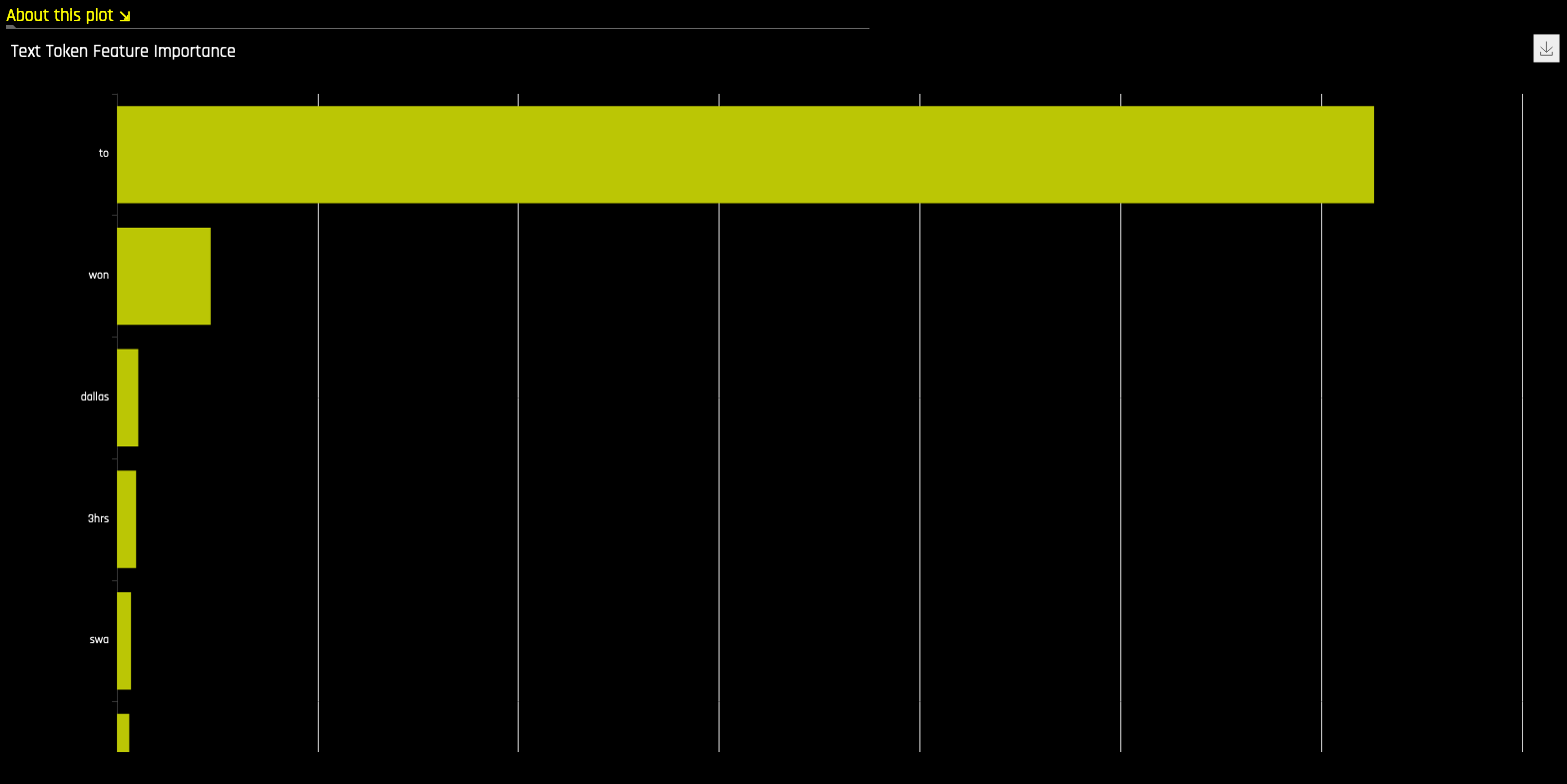
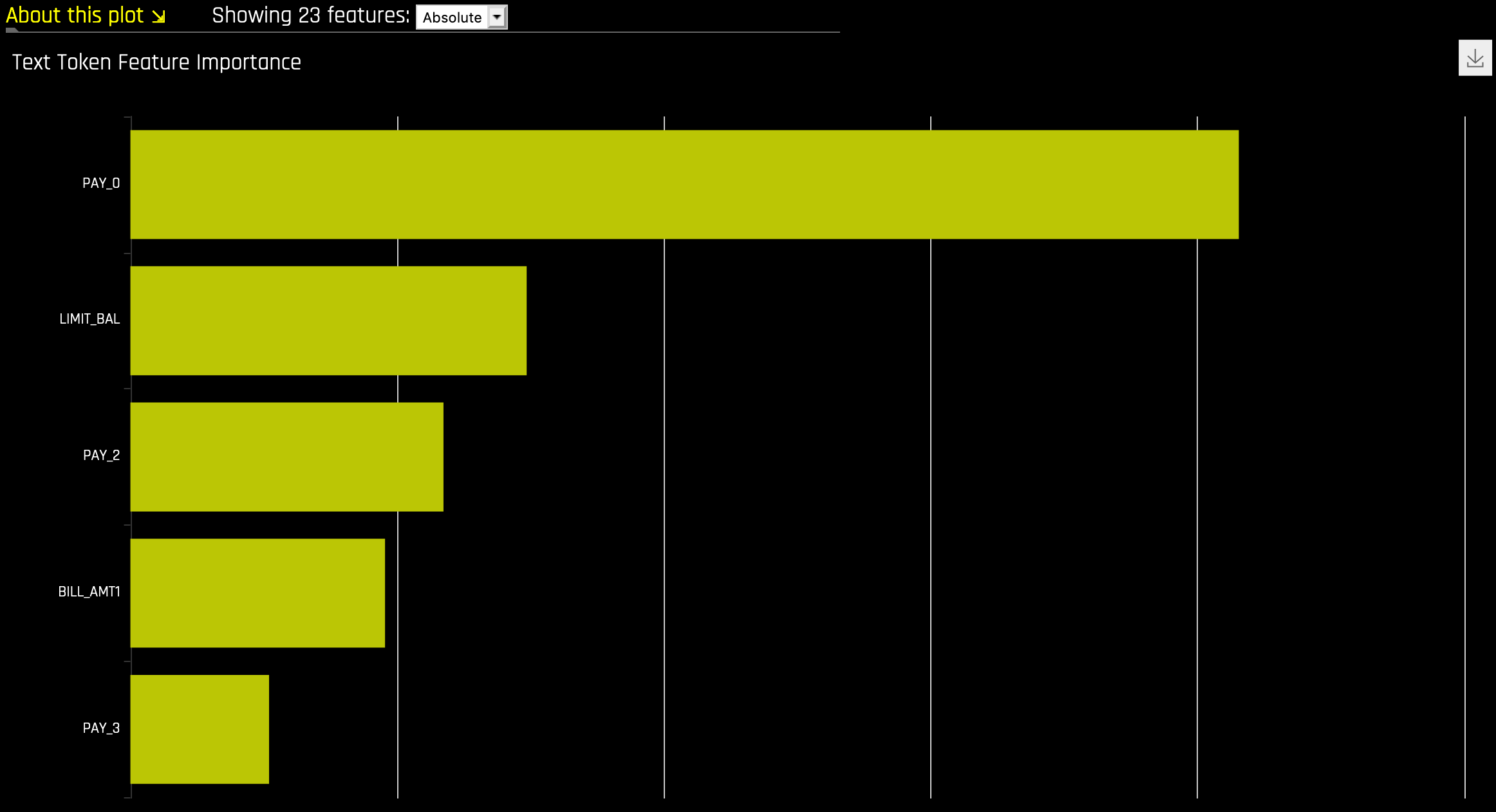
NLP Tokens¶
This plot is available for natural language processing (NLP) models.
This plot shows both the global and local importance values of each token in a corpus (a large and structured set of texts). The corpus is automatically generated from text features used by Driverless AI models prior to the process of tokenization.
Local importance values are calculated by using the term frequency–inverse document frequency (TFIDF) as a weighting factor for each token in each row. The TFIDF increases proportionally to the number of times a token appears in a given document and is offset by the number of documents in the corpus that contain the token. Specify the row that you want to view, then click the Search button to see the local importance of each token in that row.
Global importance values are calculated by using the inverse document frequency (IDF), which measures how common or rare a given token is across all documents. (Default View)
Notes:
MLI support for NLP is not available for multinomial experiments.
MLI for NLP does not currently feature the option to remove stop words.
By default, up to 10,000 tokens are created during the tokenization process. This value can be changed in the configuration.
By default, Driverless AI uses up to 10,000 documents to extract tokens from. This value can be changed with the
config.mli_nlp_sample_limitparameter. Downsampling is used for datasets that are larger than the default sample limit.Driverless AI does not currently generate a K-LIME scoring pipeline for MLI NLP problems.

NLP LOCO¶
This plot is available for natural language processing (NLP) models.
This plot applies a leave-one-covariate-out (LOCO) styled approach to NLP models by removing a specific token from all text features in a record and predicting local importance without that token. The difference between the resulting score and the original score (token included) is useful when trying to determine how specific changes to text features alter the predictions made by the model.
Notes:
MLI support for NLP is not available for multinomial experiments.
Due to computational complexity, the global importance value is only calculated for \(N\) (20 by default) tokens. This value can be changed with the
mli_nlp_top_nconfiguration option.A specific token selection method can be used by specifying one of the following options for the
mli_nlp_min_token_modeconfiguration option:
linspace: Selects \(N\) evenly spaced tokens according to their IDF score (Default)
top: Selects top \(N\) tokens by IDF score
bottom: Selects bottom \(N\) tokens by IDF score
Local values for NLP LOCO can take a significant amount of time to calculate depending on the specifications of your hardware.
Driverless AI does not currently generate a K-LIME scoring pipeline for MLI NLP problems.
Permutation Feature Importance¶
Note: The Permutation-based feature importance plot is only available if the autodoc_include_permutation_feature_importance configuration option was enabled when starting Driverless AI or when starting the experiment. In addition, this plot is only available for binary classification and regression experiments.
Permutation-based feature importance shows how much a model’s performance would change if a feature’s values were permuted. If the feature has little predictive power, shuffling its values should have little impact on the model’s performance. If a feature is highly predictive, however, shuffling its values should decrease the model’s performance. The difference between the model’s performance before and after permuting the feature provides the feature’s absolute permutation importance.
Surrogate Models Dropdown¶
The Surrogate Models dropdown includes K-LIME/LIME-SUP and Decision Tree plots as well as a Random Forest submenu, which includes Global and Local Feature Importance plots for original features and a Partial Dependence plot.
Note: For multiclass classification experiments, only the Global and Local Feature Importance plot for the Random Forest surrogate model is available in this dropdown.
K-LIME and LIME-SUP¶
The MLI screen includes a K-LIME or LIME-SUP graph. A K-LIME graph is available by default when you interpret a model from the experiment page. When you create a new interpretation, you can instead choose to use LIME-SUP as the LIME method. Note that these graphs are essentially the same, but the K-LIME/LIME-SUP distinction provides insight into the LIME method that was used during model interpretation.
The K-LIME Technique¶
This plot is available for binary classification and regression models.
K-LIME is a variant of the LIME technique proposed by Ribeiro at al (2016). K-LIME generates global and local explanations that increase the transparency of the Driverless AI model, and allow model behavior to be validated and debugged by analyzing the provided plots, and comparing global and local explanations to one-another, to known standards, to domain knowledge, and to reasonable expectations.
K-LIME creates one global surrogate GLM on the entire training data and also creates numerous local surrogate GLMs on samples formed from k-means clusters in the training data. The features used for k-means are selected from the Random Forest surrogate model’s variable importance. The number of features used for k-means is the minimum of the top 25% of variables from the Random Forest surrogate model’s variable importance and the max number of variables that can be used for k-means, which is set by the user in the config.toml setting for mli_max_number_cluster_vars. (Note, if the number of features in the dataset are less than or equal to 6, then all features are used for k-means clustering.) The previous setting can be turned off to use all features for k-means by setting use_all_columns_klime_kmeans in the config.toml file to true. All penalized GLM surrogates are trained to model the predictions of the Driverless AI model. The number of clusters for local explanations is chosen by a grid search in which the \(R^2\) between the Driverless AI model predictions and all of the local K-LIME model predictions is maximized. The global and local linear model’s intercepts, coefficients, \(R^2\) values, accuracy, and predictions can all be used to debug and develop explanations for the Driverless AI model’s behavior.
The parameters of the global K-LIME model give an indication of overall linear feature importance and the overall average direction in which an input variable influences the Driverless AI model predictions. The global model is also used to generate explanations for very small clusters (\(N < 20\)) where fitting a local linear model is inappropriate.
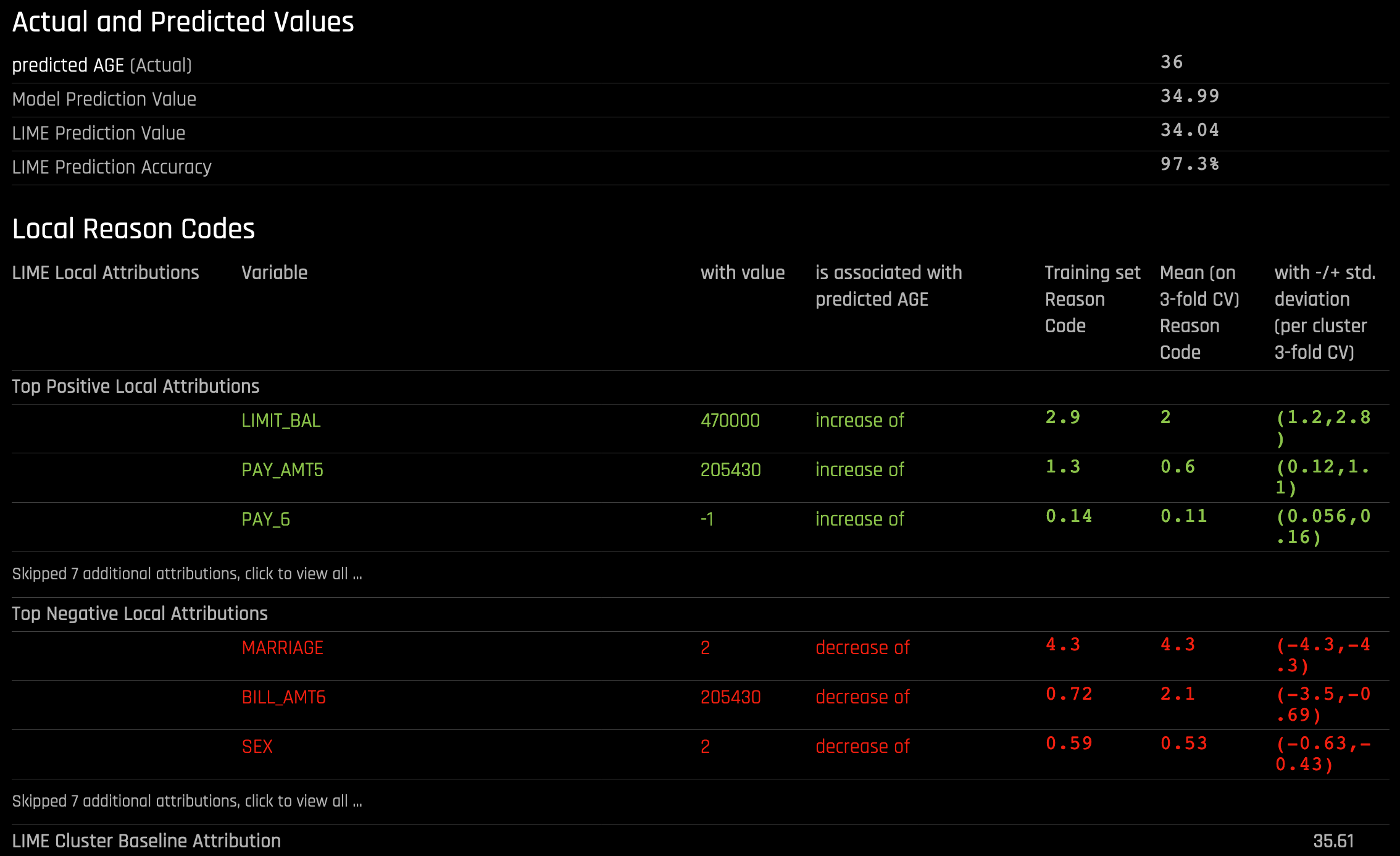
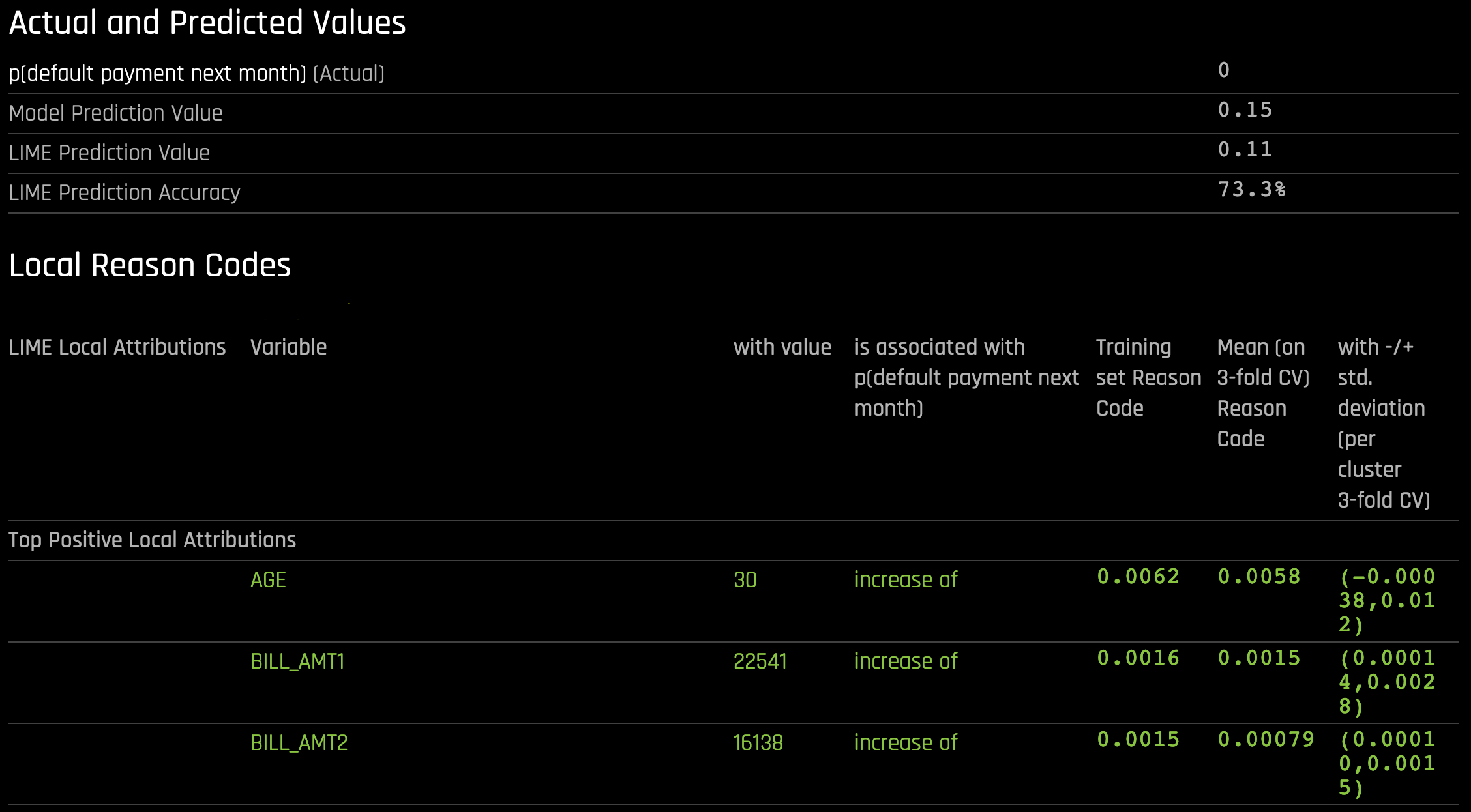
The in-cluster linear model parameters can be used to profile the local region, to give an average description of the important variables in the local region, and to understand the average direction in which an input variable affects the Driverless AI model predictions. For a point within a cluster, the sum of the local linear model intercept and the products of each coefficient with their respective input variable value are the K-LIME prediction. By disaggregating the K-LIME predictions into individual coefficient and input variable value products, the local linear impact of the variable can be determined. This product is sometimes referred to as a reason code and is used to create explanations for the Driverless AI model’s behavior.
In the following example, reason codes are created by evaluating and disaggregating a local linear model.
Given the row of input data with its corresponding Driverless AI and K-LIME predictions:
debt_to_income_ ratio |
credit_ score |
savings_acct_ balance |
observed_ default |
H2OAI_predicted_ default |
K-LIME_predicted_ default |
|---|---|---|---|---|---|
30 |
600 |
1000 |
1 |
0.85 |
0.9 |
And the local linear model:
\(\small{y_\text{K-LIME} = 0.1 + 0.01 * debt\_to\_income\_ratio + 0.0005 * credit\_score + 0.0002 * savings\_account\_balance}\)
It can be seen that the local linear contributions for each variable are:
debt_to_income_ratio: 0.01 * 30 = 0.3
credit_score: 0.0005 * 600 = 0.3
savings_acct_balance: 0.0002 * 1000 = 0.2
Each local contribution is positive and thus contributes positively to the Driverless AI model’s prediction of 0.85 for H2OAI_predicted_default. By taking into consideration the value of each contribution, reason codes for the Driverless AI decision can be derived. debt_to_income_ratio and credit_score would be the two largest negative reason codes, followed by savings_acct_balance.
The local linear model intercept and the products of each coefficient and corresponding value sum to the K-LIME prediction. Moreover it can be seen that these linear explanations are reasonably representative of the nonlinear model’s behavior for this individual because the K-LIME predictions are within 5.5% of the Driverless AI model prediction. This information is encoded into English language rules which can be viewed by clicking the Explanations button.
Like all LIME explanations based on linear models, the local explanations are linear in nature and are offsets from the baseline prediction, or intercept, which represents the average of the penalized linear model residuals. Of course, linear approximations to complex non-linear response functions will not always create suitable explanations and users are urged to check the K-LIME plot, the local model \(R^2\), and the accuracy of the K-LIME prediction to understand the validity of the K-LIME local explanations. When K-LIME accuracy for a given point or set of points is quite low, this can be an indication of extremely nonlinear behavior or the presence of strong or high-degree interactions in this local region of the Driverless AI response function. In cases where K-LIME linear models are not fitting the Driverless AI model well, nonlinear LOCO feature importance values may be a better explanatory tool for local model behavior. As K-LIME local explanations rely on the creation of k-means clusters, extremely wide input data or strong correlation between input variables may also degrade the quality of K-LIME local explanations.
The LIME-SUP Technique¶
This plot is available for binary classification and regression models.
LIME-SUP explains local regions of the trained Driverless AI model in terms of the original variables. Local regions are defined by each leaf node path of the decision tree surrogate model instead of simulated, perturbed observation samples - as in the original LIME. For each local region, a local GLM model is trained on the original inputs and the predictions of the Driverless AI model. Then the parameters of this local GLM can be used to generate approximate, local explanations of the Driverless AI model.
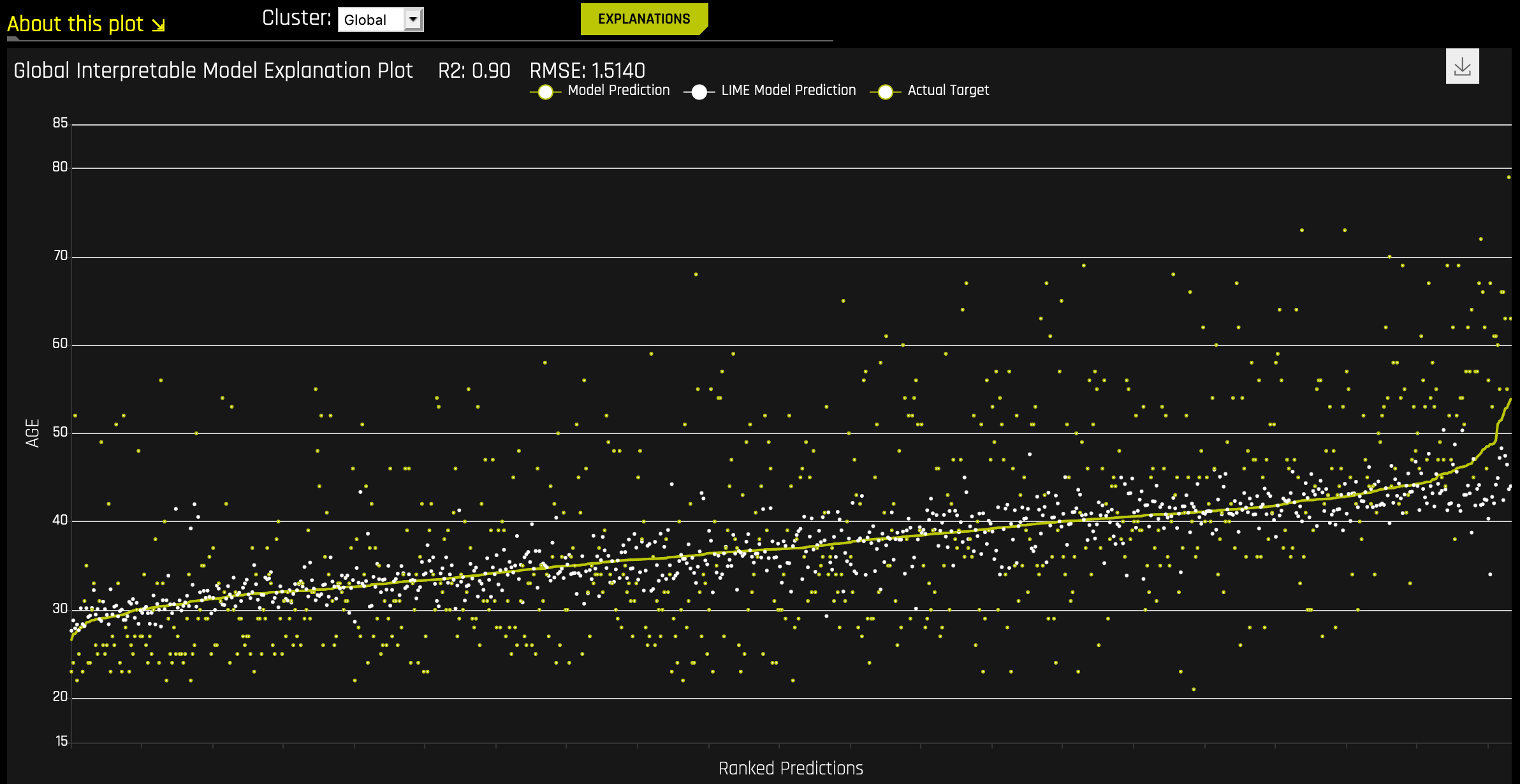
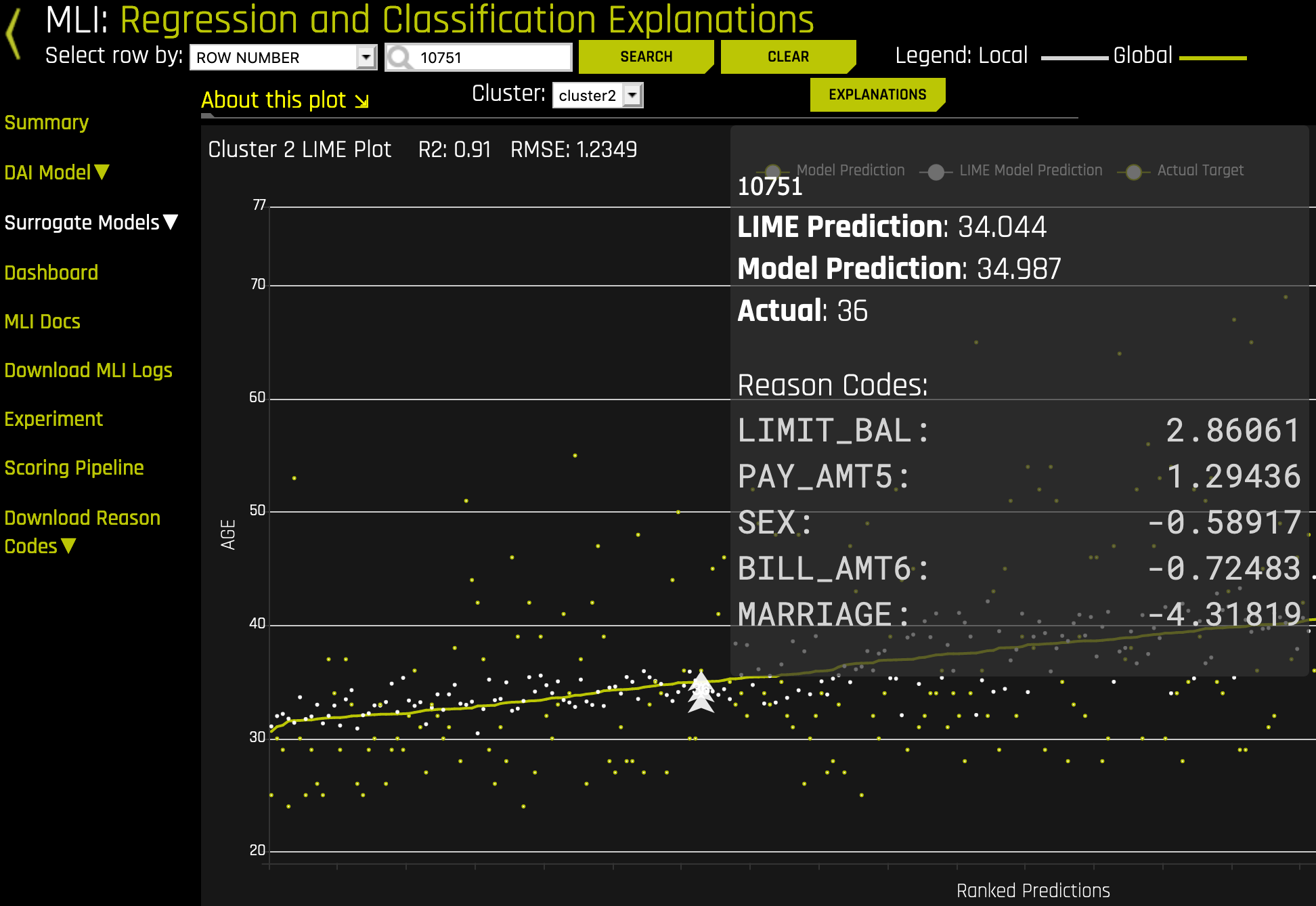
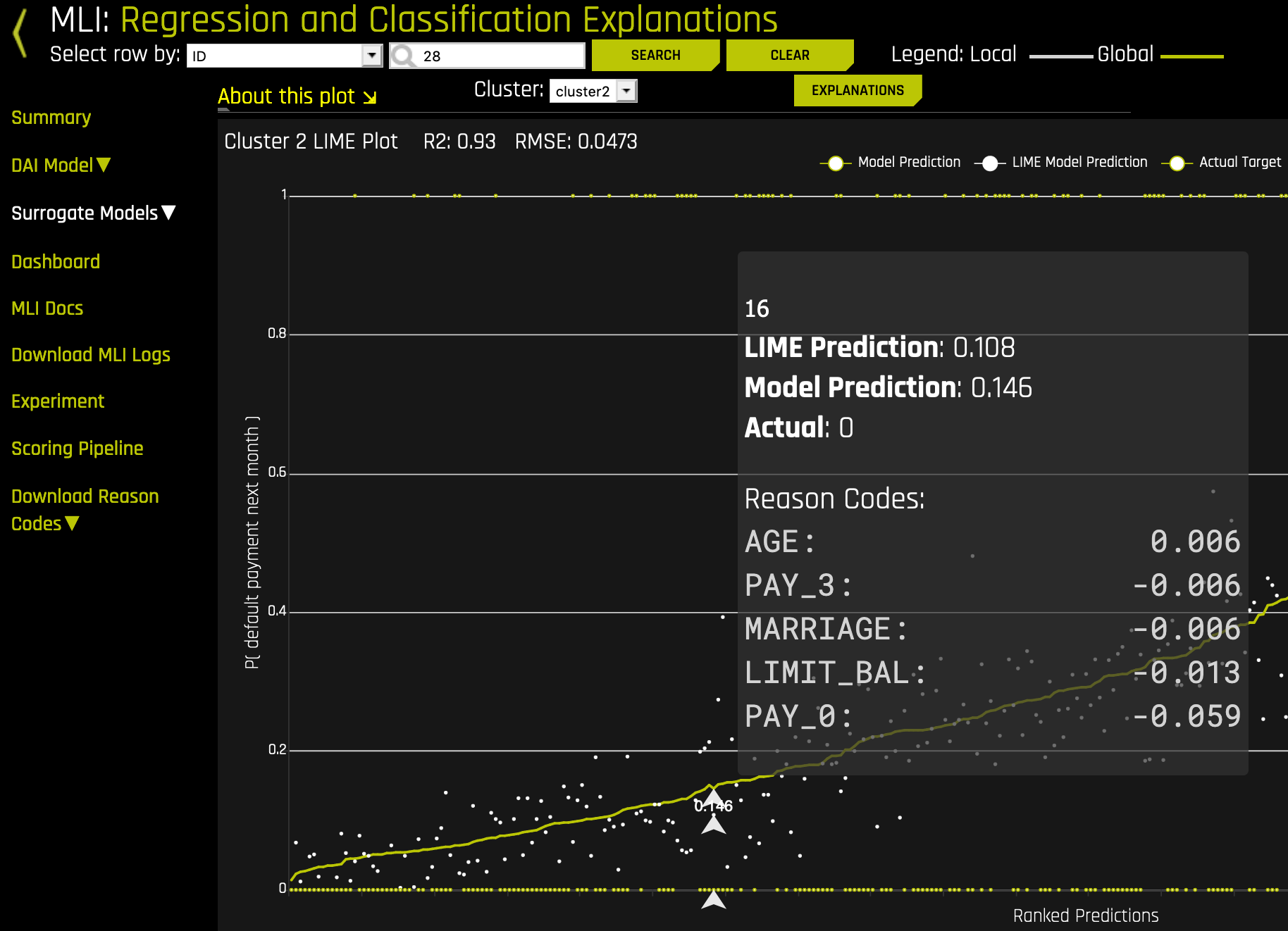
The Global Interpretable Model Explanation Plot
This plot shows Driverless AI model predictions and LIME model predictions in sorted order by the Driverless AI model predictions. This graph is interactive. Hover over the Model Prediction, LIME Model Prediction, or Actual Target radio buttons to magnify the selected predictions. Or click those radio buttons to disable the view in the graph. You can also hover over any point in the graph to view LIME reason codes for that value. By default, this plot shows information for the global LIME model, but you can change the plot view to show local results from a specific cluster. The LIME plot also provides a visual indication of the linearity of the Driverless AI model and the trustworthiness of the LIME explanations. The closer the local linear model approximates the Driverless AI model predictions, the more linear the Driverless AI model and the more accurate the explanation generated by the LIME local linear models.
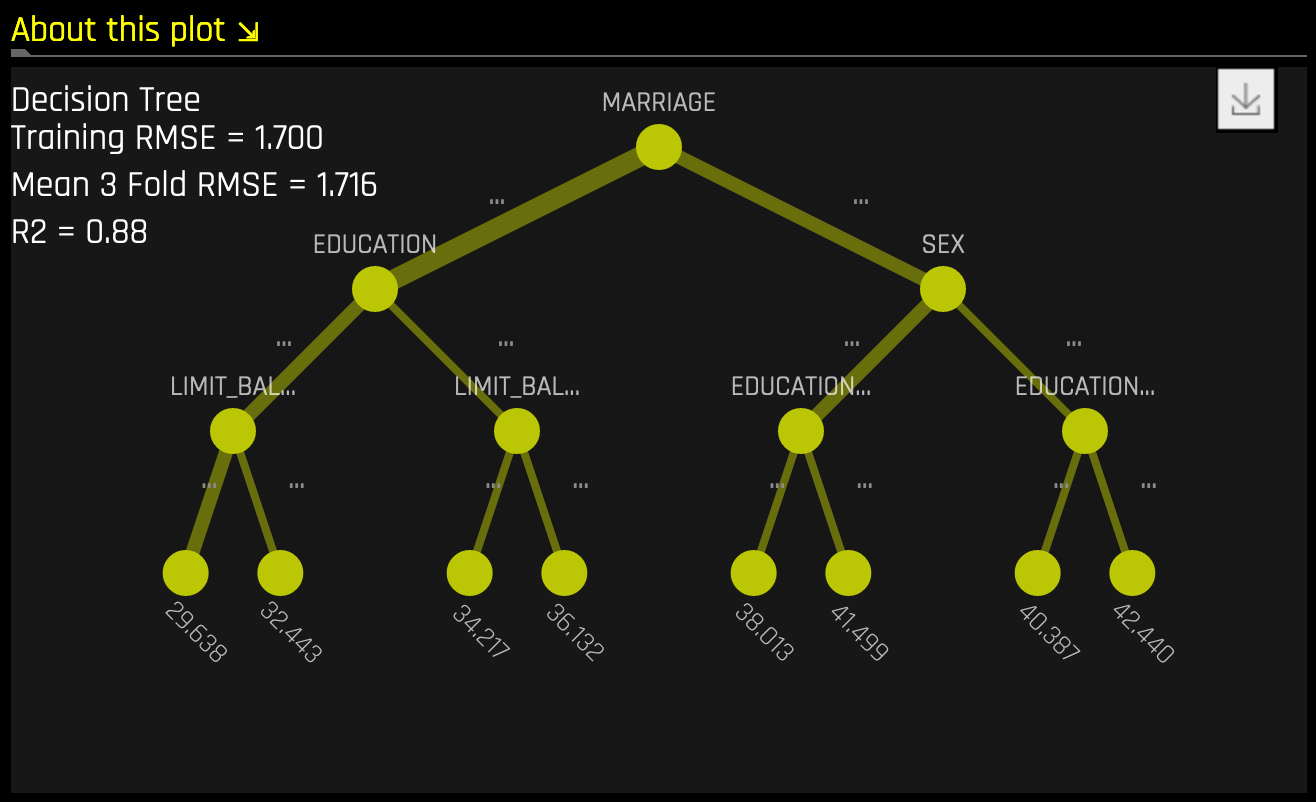
Decision Tree¶
The Decision Tree Surrogate Model Technique¶
The decision tree surrogate model increases the transparency of the Driverless AI model by displaying an approximate flow-chart of the complex Driverless AI model’s decision making process. The decision tree surrogate model also displays the most important variables in the Driverless AI model and the most important interactions in the Driverless AI model. The decision tree surrogate model can be used for visualizing, validating, and debugging the Driverless AI model by comparing the displayed decision-process, important variables, and important interactions to known standards, domain knowledge, and reasonable expectations.
A surrogate model is a data mining and engineering technique in which a generally simpler model is used to explain another, usually more complex, model or phenomenon. The decision tree surrogate is known to date back at least to 1996 (Craven and Shavlik). The decision tree surrogate model here is trained to predict the predictions of the more complex Driverless AI model using the of original model inputs. The trained surrogate model enables a heuristic understanding (i.e., not a mathematically precise understanding) of the mechanisms of the highly complex and nonlinear Driverless AI model.
The Decision Tree Plot¶
This plot is available for binary classification and regression models.
In the Decision Tree plot, the highlighted row shows the path to the highest probability leaf node and indicates the globally important variables and interactions that influence the Driverless AI model prediction for that row.
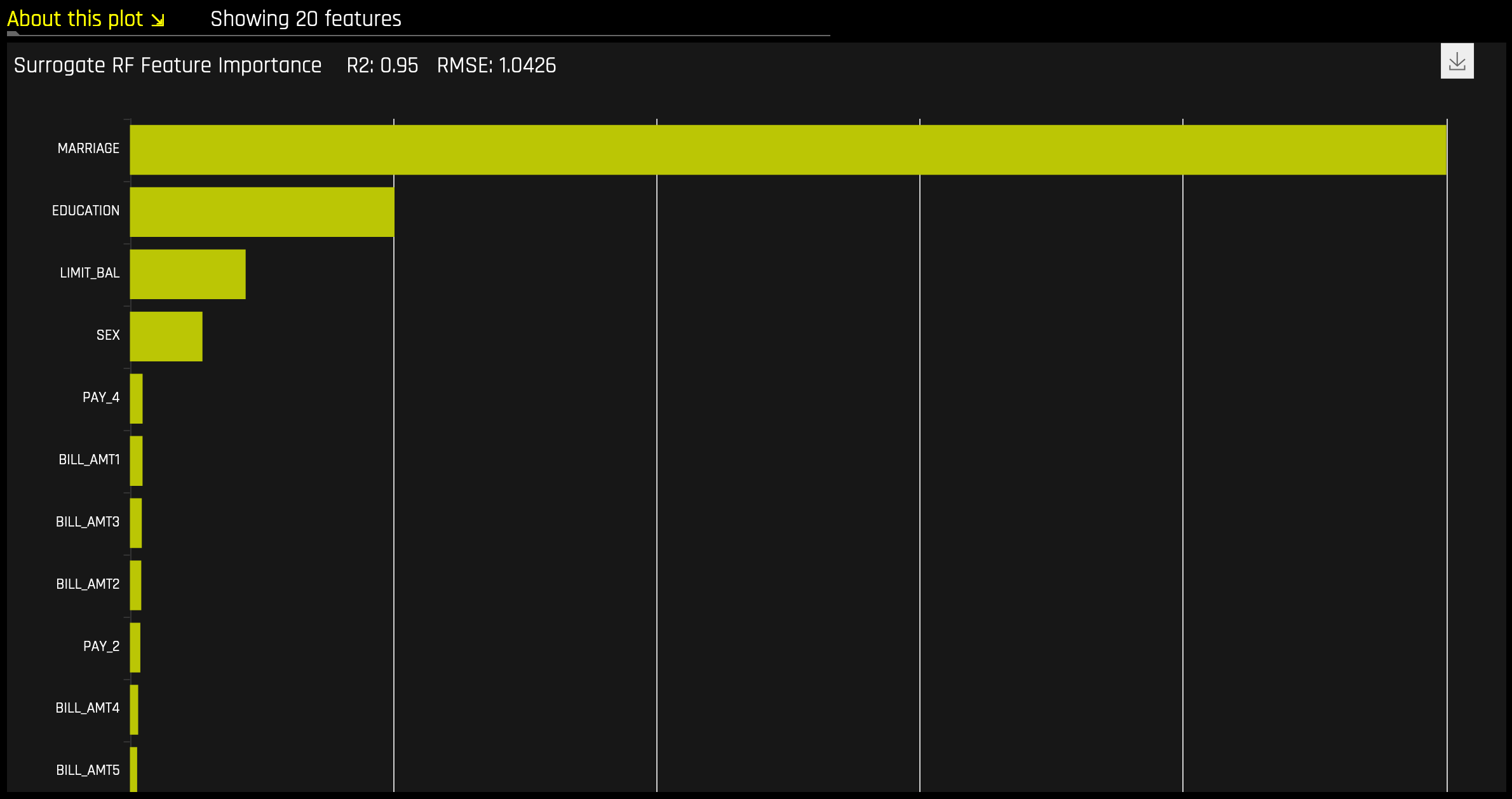
Random Forest Dropdown¶
The Random Forest dropdown provides a submenu that includes a Feature Importance plot, a Partial Dependence plot, and a LOCO plot. These plots are for original features rather than transformed features.
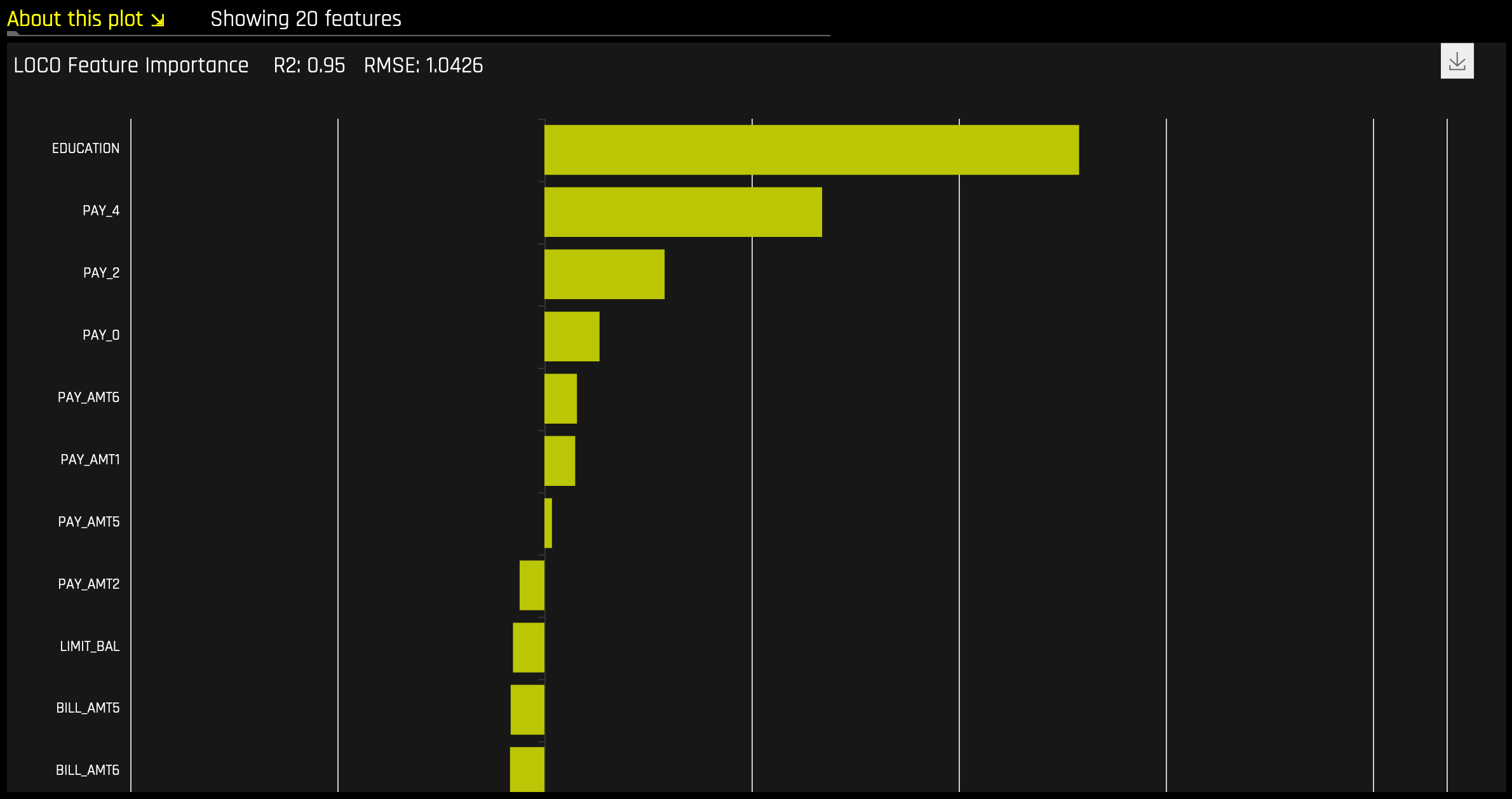
Feature Importance¶
Global Feature Importance vs Local Feature Importance
Global feature importance (yellow) is a measure of the contribution of an input variable to the overall predictions of the Driverless AI model. Global feature importance is calculated by aggregating the improvement in splitting criterion caused by a single variable across all of the decision trees in the Driverless AI model.
Local feature importance (grey) is a measure of the contribution of an input variable to a single prediction of the Driverless AI model. Local feature importance is calculated by removing the contribution of a variable from every decision tree in the Driverless AI model and measuring the difference between the prediction with and without the variable.
Both global and local variable importance are scaled so that the largest contributor has a value of 1.
Note: Engineered features are used for MLI when a time series experiment is built. This is because munged time series features are more useful features for MLI than raw time series features, as raw time series features are not IID (Independent and Identically Distributed).
LOCO¶
Local feature importance describes how the combination of the learned model rules or parameters and an individual row’s attributes affect a model’s prediction for that row while taking nonlinearity and interactions into effect. Local feature importance values reported here are based on a variant of the leave-one-covariate-out (LOCO) method (Lei et al, 2017).
In the LOCO-variant method, each local feature importance is found by re-scoring the trained Driverless AI model for each feature in the row of interest, while removing the contribution to the model prediction of splitting rules that contain that feature throughout the ensemble. The original prediction is then subtracted from this modified prediction to find the raw, signed importance for the feature. All local feature importance values for the row are then scaled between 0 and 1 for direct comparison with global feature importance values.
Given the row of input data with its corresponding Driverless AI and K-LIME predictions:
debt_to_income_ ratio |
credit_ score |
savings_acct_ balance |
observed_ default |
H2OAI_predicted_ default |
K-LIME_predicted_ default |
|---|---|---|---|---|---|
30 |
600 |
1000 |
1 |
0.85 |
0.9 |
Taking the Driverless AI model as F(X), LOCO-variant feature importance values are calculated as follows.
First, the modified predictions are calculated:
\(F_{~debt\_to\_income\_ratio} = F(NA, 600, 1000) = 0.99\)
\(F_{~credit\_score} = F(30, NA, 1000) = 0.73\)
\(F_{~savings\_acct\_balance} = F(30, 600, NA) = 0.82\)
Second, the original prediction is subtracted from each modified prediction to generate the unscaled local feature importance values:
\(\text{LOCO}_{debt\_to\_income\_ratio} = F_{~debt\_to\_income\_ratio} - 0.85 = 0.99 - 0.85 = 0.14\)
\(\text{LOCO}_{credit\_score} = F_{~credit\_score} - 0.85 = 0.73 - 0.85 = -0.12\)
\(\text{LOCO}_{savings\_acct\_balance} = F_{~savings\_acct\_balance} - 0.85 = 0.82 - 0.85 = -0.03\)
Finally LOCO values are scaled between 0 and 1 by dividing each value for the row by the maximum value for the row and taking the absolute magnitude of this quotient.
\(\text{Scaled}(\text{LOCO}_{debt\_to\_income\_ratio}) = \text{Abs}(\text{LOCO}_{~debt\_to\_income\_ratio}/0.14) = 1\)
\(\text{Scaled}(\text{LOCO}_{credit\_score}) = \text{Abs}(\text{LOCO}_{~credit\_score}/0.14) = 0.86\)
\(\text{Scaled}(\text{LOCO}_{savings\_acct\_balance}) = \text{Abs}(\text{LOCO}_{~savings\_acct\_balance} / 0.14) = 0.21\)
One drawback to these LOCO-variant feature importance values is, unlike K-LIME, it is difficult to generate a mathematical error rate to indicate when LOCO values may be questionable.
Partial Dependence and Individual Conditional Expectation¶
A Partial Dependence and ICE plot is available for both Driverless AI and surrogate models. Refer to the previous Partial Dependence and Individual Conditional Expectation section for more information about this plot.
NLP Surrogate Models¶
These plots are available for natural language processing (NLP) models.
For NLP surrogate models, Driverless AI creates a TFIDF matrix by tokenizing all text features. The resulting frame is appended to numerical or categorical columns from the training dataset, and the original text columns are removed. This frame is then used for training surrogate models that have prediction columns consisting of tokens and the original numerical or categorical features.
Notes:
MLI support for NLP is not available for multinomial experiments.
Each row in the TFIDF matrix contains \(N\) columns, where \(N\) is the total number of tokens in the corpus with values that are appropriate for that row (0 if absent).
Driverless AI does not currently generate a K-LIME scoring pipeline for MLI NLP problems.
Dashboard Page¶
The Model Interpretation Dashboard includes the following information:
Global interpretable model explanation plot
Feature importance (Global for original features; LOCO for interpretations with predictions and when interpreting on raw features)
Decision tree surrogate model
Partial dependence and individual conditional expectation plots
Note: The Dashboard is not available for multiclass classification experiments.

Viewing Explanations¶
Note: Not all explanatory functionality is available for multinomial classification scenarios.
Driverless AI provides easy-to-read explanations for a completed model. You can view these by clicking the Explanations button on the Model Interpretation > Dashboard page for an interpreted model.
The UI allows you to view global, cluster-specific, and local reason codes. You can also export the explanations to CSV.
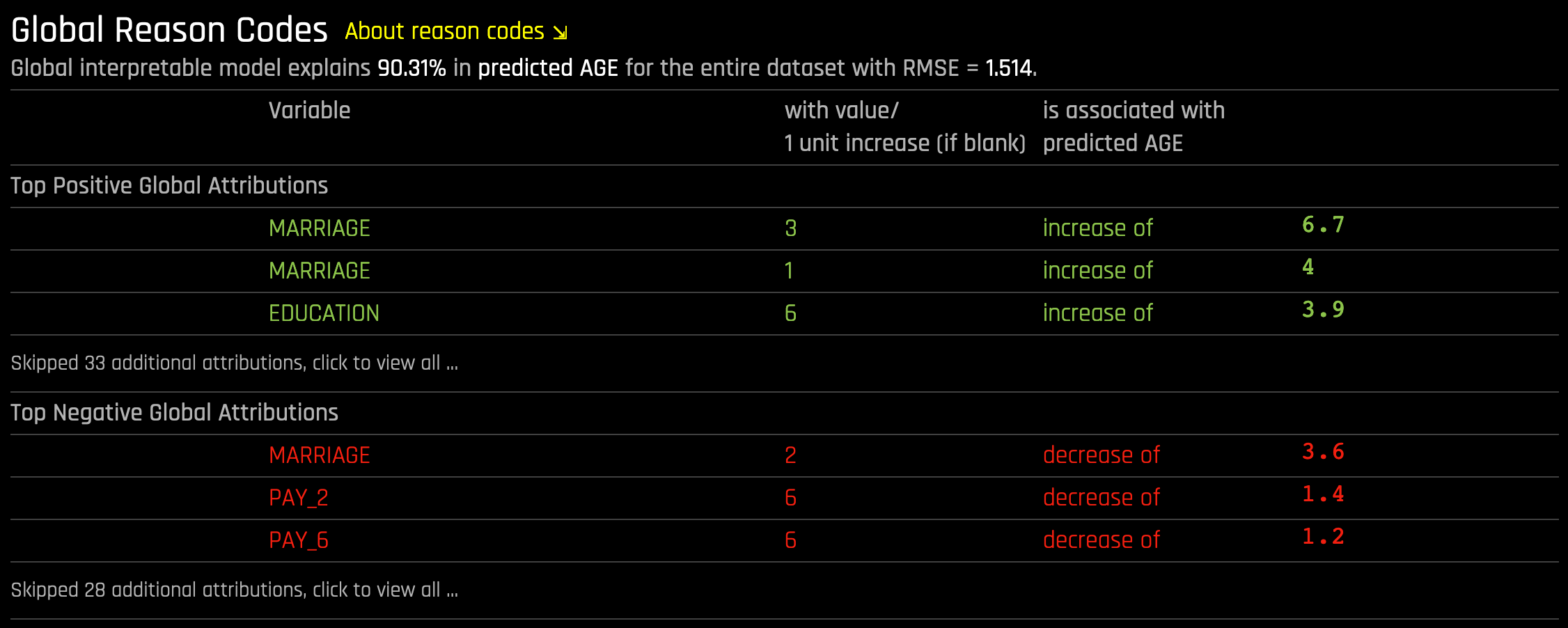
Global Reason Codes: To view global reason codes, select the Global from the Cluster dropdown.

With Global selected, click the Explanations button beside the Cluster dropdown.
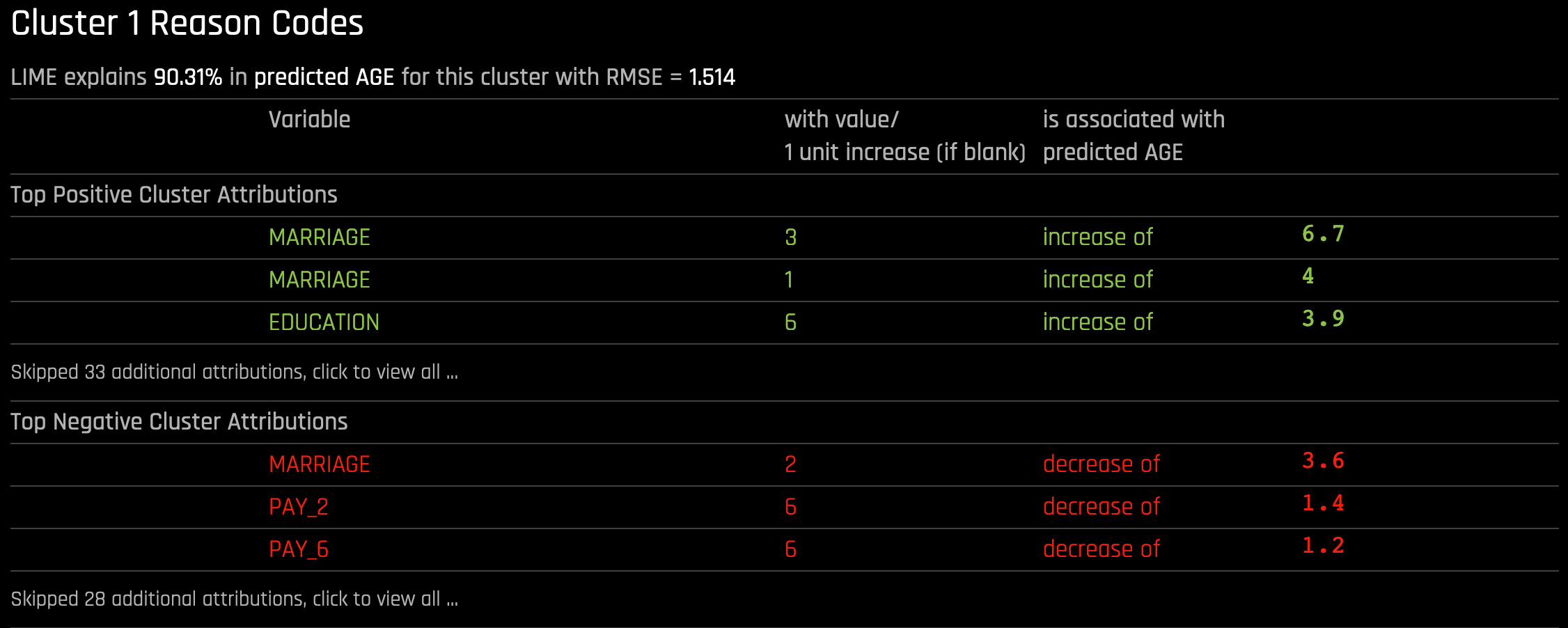
Cluster Reason Codes: To view reason codes for a specific cluster, select a cluster from the Cluster dropdown.

With a cluster selected, click the Explanations button.
Local Reason Codes by Row Number: To view local reason codes for a specific row, select a point on the graph or type a value in the Row Number field.
With a value selected, click the Explanations button.
Local Reason Codes by ID: Identifier columns cannot be specified by the user - MLI makes this choice automatically by choosing columns whose values are unique (dataset row count equals the number of unique values in a column). To find a row by identifier column, choose Identifier Column from the drop-down menu (if it meets the logic of being an identifier column), and then specify a value.
With a value selected, click the Explanations button.
General Considerations¶
Machine Learning and Approximate Explanations¶
For years, common sense has deemed the complex, intricate formulas created by training machine learning algorithms to be uninterpretable. While great advances have been made in recent years to make these often nonlinear, non-monotonic, and non-continuous machine-learned response functions more understandable (Hall et al, 2017), it is likely that such functions will never be as directly or universally interpretable as more traditional linear models.
Why consider machine learning approaches for inferential purposes? In general, linear models focus on understanding and predicting average behavior, whereas machine-learned response functions can often make accurate, but more difficult to explain, predictions for subtler aspects of modeled phenomenon. In a sense, linear models create very exact interpretations for approximate models. The approach here seeks to make approximate explanations for very exact models. It is quite possible that an approximate explanation of an exact model may have as much, or more, value and meaning than the exact interpretations of an approximate model. Moreover, the use of machine learning techniques for inferential or predictive purposes does not preclude using linear models for interpretation (Ribeiro et al, 2016).
The Multiplicity of Good Models in Machine Learning¶
It is well understood that for the same set of input variables and prediction targets, complex machine learning algorithms can produce multiple accurate models with very similar, but not exactly the same, internal architectures (Breiman, 2001). This alone is an obstacle to interpretation, but when using these types of algorithms as interpretation tools or with interpretation tools it is important to remember that details of explanations will change across multiple accurate models.
Expectations for Consistency Between Explanatory Techniques¶
The decision tree surrogate is a global, nonlinear description of the Driverless AI model behavior. Variables that appear in the tree should have a direct relationship with variables that appear in the global feature importance plot. For certain, more linear Driverless AI models, variables that appear in the decision tree surrogate model may also have large coefficients in the global K-LIME model.
K-LIME explanations are linear, do not consider interactions, and represent offsets from the local linear model intercept. LOCO importance values are nonlinear, do consider interactions, and do not explicitly consider a linear intercept or offset. LIME explanations and LOCO importance values are not expected to have a direct relationship but can align roughly as both are measures of a variable’s local impact on a model’s predictions, especially in more linear regions of the Driverless AI model’s learned response function.
ICE is a type of nonlinear sensitivity analysis which has a complex relationship to LOCO feature importance values. Comparing ICE to LOCO can only be done at the value of the selected variable that actually appears in the selected row of the training data. When comparing ICE to LOCO the total value of the prediction for the row, the value of the variable in the selected row, and the distance of the ICE value from the average prediction for the selected variable at the value in the selected row must all be considered.
ICE curves that are outside the standard deviation of partial dependence would be expected to fall into less populated decision paths of the decision tree surrogate; ICE curves that lie within the standard deviation of partial dependence would be expected to belong to more common decision paths.
Partial dependence takes into consideration nonlinear, but average, behavior of the complex Driverless AI model without considering interactions. Variables with consistently high partial dependence or partial dependence that swings widely across an input variable’s domain will likely also have high global importance values. Strong interactions between input variables can cause ICE values to diverge from partial dependence values.